The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |

| 2017-05-18 12:29:29 -0500 | received badge | ● Famous Question (source) |
| 2017-02-01 02:29:48 -0500 | received badge | ● Famous Question (source) |
| 2017-01-19 00:56:25 -0500 | received badge | ● Notable Question (source) |
| 2016-11-10 04:57:02 -0500 | received badge | ● Popular Question (source) |
| 2016-11-09 05:16:59 -0500 | commented answer | How to set start state in moveit except setStartState() Thank you!I try to setting pose with setJointGroupPositions(). It worked! |
| 2016-11-08 02:36:59 -0500 | asked a question | How to set start state in moveit except setStartState() I do not want my robot plan from current pose. So I try to set start pose of my robot to another pose. I followed http://docs.ros.org/indigo/api/moveit... , and used setStartState() to change robot start pose. But, I found setFromIK() always return false and could not find IK solution. Is there any problem in this program? Or is there other method to set start pose of robot? Thank you very much. |
| 2016-11-07 21:26:24 -0500 | asked a question | How to set start state using setStartState() in moveit I do not want my robot plan from current pose. So I try to set start pose of my robot to another pose. I followed http://docs.ros.org/indigo/api/moveit... , and used setStartState() to change robot start pose. But, I found the start state was not changed after setStartState(). So, how could I change the start pose? Thank you very much. |
| 2016-10-08 02:15:50 -0500 | received badge | ● Notable Question (source) |
| 2016-05-13 04:38:51 -0500 | received badge | ● Popular Question (source) |
| 2016-04-28 01:48:56 -0500 | received badge | ● Enthusiast |
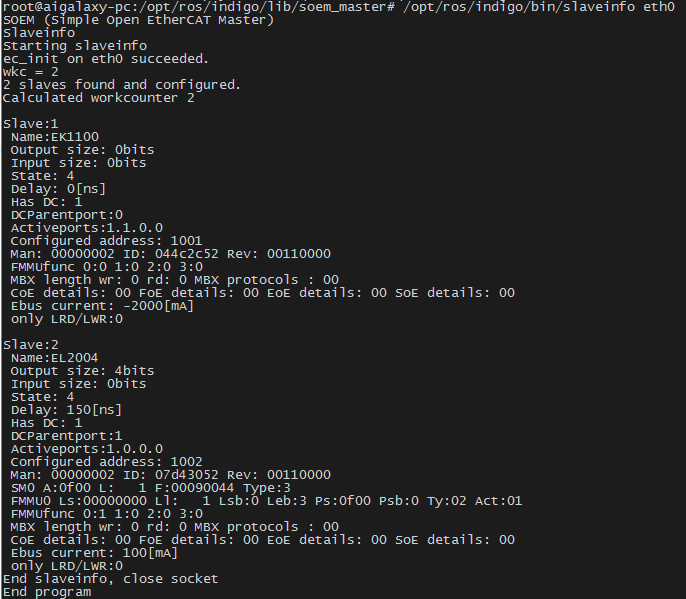
| 2016-04-26 03:20:17 -0500 | asked a question | How to control backhoff EK1100 and EL2004 using ethercat Hello, I want to control backhoff EK1100 and EL2004 using ethercat. I found ethercat packages--rtt_soem. But there are not many tutorials about how to use these packages. Could anyone tell me what should I do? Thank you! Note: slaveinfo
|
| 2016-04-26 03:05:55 -0500 | received badge | ● Famous Question (source) |
| 2014-04-30 01:20:54 -0500 | received badge | ● Notable Question (source) |
| 2014-04-30 01:20:54 -0500 | received badge | ● Famous Question (source) |
| 2014-04-30 01:20:54 -0500 | received badge | ● Popular Question (source) |
| 2014-01-28 17:28:31 -0500 | marked best answer | Can I install ros into a ARM chip? I have a ARM A9 chip, and i can run a ubuntu in the chip . So can i install the ROS into the chip? |
| 2013-11-12 22:35:33 -0500 | marked best answer | how to link openni library through the "CMakeLists.txt" file I have installed ROS groovy and openni library in the ARM chip. Now I want to use openni library fouction , but I do not know how to link openni library through the "CMakeLists.txt" file. I used "target_link_libraries(${PROJECT_NAME} OpenNI)",but it can not link openni founction.Who can tell me how to link openni and write cmake file? |
| 2013-10-21 14:13:38 -0500 | received badge | ● Notable Question (source) |
| 2013-07-30 12:16:25 -0500 | received badge | ● Popular Question (source) |
| 2013-07-27 23:29:29 -0500 | asked a question | How to generate imu data? My Robot has a Gyro and an Accelerometer, so how can I generate imu data? And where can I find a C++ example? Thank you ! |
| 2013-06-25 15:46:41 -0500 | commented answer | How to troubleshoot network delay Think you very much , I will try it! |
| 2013-06-24 17:21:57 -0500 | asked a question | How to troubleshoot network delay My robot sends kinect XYZ and RGB data to PC through wifi. The amount of data for each frame is about 700KB, but I can only send 3 frames every second. If I send more frame , the network will be delay heavily. Is this normal? |
| 2013-05-13 04:19:10 -0500 | received badge | ● Famous Question (source) |
| 2013-04-05 21:48:01 -0500 | received badge | ● Famous Question (source) |
| 2013-04-01 02:43:33 -0500 | received badge | ● Famous Question (source) |
| 2013-03-09 16:42:58 -0500 | received badge | ● Notable Question (source) |
| 2013-03-08 07:15:35 -0500 | received badge | ● Popular Question (source) |
| 2013-03-08 04:53:50 -0500 | received badge | ● Nice Question (source) |
| 2013-03-08 00:52:51 -0500 | received badge | ● Student (source) |
| 2013-03-08 00:49:36 -0500 | asked a question | How to produce PointCloud2 from original data with kinect I use ros-comm in a ARM chip. Because the package "openni_camera" can not work in the ARM chip, so I have to get kinect data using openni library. Then I send the data to the PC ,and want to prdouce the PointCloud2 from these original data. How this should be to do? My PC also has ROS. This is my code to produce original data with kinect: |
| 2013-03-08 00:32:29 -0500 | received badge | ● Notable Question (source) |
| 2013-03-03 13:29:59 -0500 | received badge | ● Scholar (source) |
| 2013-02-28 00:05:03 -0500 | received badge | ● Popular Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.