The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-08-23 00:34:42 -0500 | marked best answer | Trouble trying to find ActionType for "execute_trajectory" Action Server Hello, i'm running ROS Kinetic on Ubuntu 16.04 and working with the Panda robot from Franka Emika. I'm currently trying to send a command to the robot via Python scripting, i.e Action Client. I can already send commands to the robot (like stopping it) through the command line, like: And i would like to do the same but with Python, so i tried the following: It doesn't work because GoalID is not an action type message. And in order to create the Client we need one Action message. And i find it strange that there is no action message for GoalID because "execute_trajectory" is actually an action server, meaning there should be an action message for it, right? I don't know if understood the concept of Actions wrongly but any help would be welcome! Thanks! |
| 2022-05-11 11:50:44 -0500 | received badge | ● Good Question (source) |
| 2022-02-19 13:15:34 -0500 | received badge | ● Nice Question (source) |
| 2022-02-19 13:15:25 -0500 | received badge | ● Good Answer (source) |
| 2021-05-03 08:39:28 -0500 | received badge | ● Nice Question (source) |
| 2020-11-10 17:17:47 -0500 | received badge | ● Student (source) |
| 2019-12-16 14:57:26 -0500 | answered a question | unnormalized quaternions, malformed top_plate.stl and "No map received" when running RVIZ for Clearpath Husky after upgrading to Kinetic Hello, regarding the error with the STL file: I was facing the same problem and all I did was to download top_plate.stl |
| 2019-11-19 11:42:45 -0500 | received badge | ● Nice Answer (source) |
| 2019-10-12 01:27:58 -0500 | marked best answer | Problem while Launching MoveIt! library loading error Hello. I'm using ROS Kinetic. For some reason there is a problem loading a library from OpenCV, as shown below: I already tried to reinstall the Moveit! Package, opencv3 for ROS and rebuilding my local workspace but nothing seems to work, still getting the same results. |
| 2019-08-02 05:39:07 -0500 | received badge | ● Self-Learner (source) |
| 2019-08-01 17:02:06 -0500 | received badge | ● Famous Question (source) |
| 2019-07-15 11:27:58 -0500 | received badge | ● Famous Question (source) |
| 2019-04-03 04:37:01 -0500 | received badge | ● Notable Question (source) |
| 2019-03-13 09:25:55 -0500 | received badge | ● Famous Question (source) |
| 2019-03-12 15:09:37 -0500 | received badge | ● Popular Question (source) |
| 2019-03-05 05:41:12 -0500 | received badge | ● Famous Question (source) |
| 2019-02-24 10:39:06 -0500 | received badge | ● Famous Question (source) |
| 2019-02-21 08:07:48 -0500 | asked a question | Action client not preempting action Action client not preempting action Hello, i think I'm aware how to preempt an action, which is by using the method canc |
| 2019-02-07 06:25:01 -0500 | received badge | ● Notable Question (source) |
| 2019-02-07 04:20:29 -0500 | edited answer | Didn't received robot state (joint angles) with recent timestamp within 1 seconds. Check clock synchronization if your are running ROS across multiple machines! I found the error, for some reason there was a remapping on '/opt/ros/kinetic/share/panda_moveit_config/launch/move_grou |
| 2019-02-07 03:53:49 -0500 | edited answer | How to retrieve absolute pose in ROS Hey, thanks! I managed to fix it. Actually the timestamps were correct, my tf_tree wasn't completely right, that was it. |
| 2019-02-07 03:53:08 -0500 | edited answer | How to retrieve absolute pose in ROS Hey, thanks! I managed to fix it. Actually the timestamps were correct, my tf_tree wasn't completely right, that was it. |
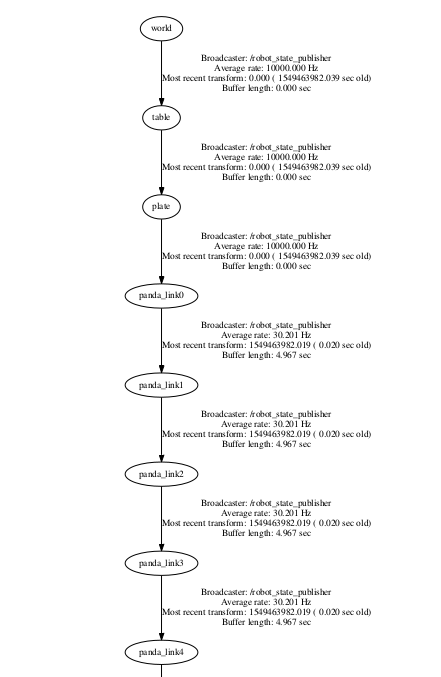
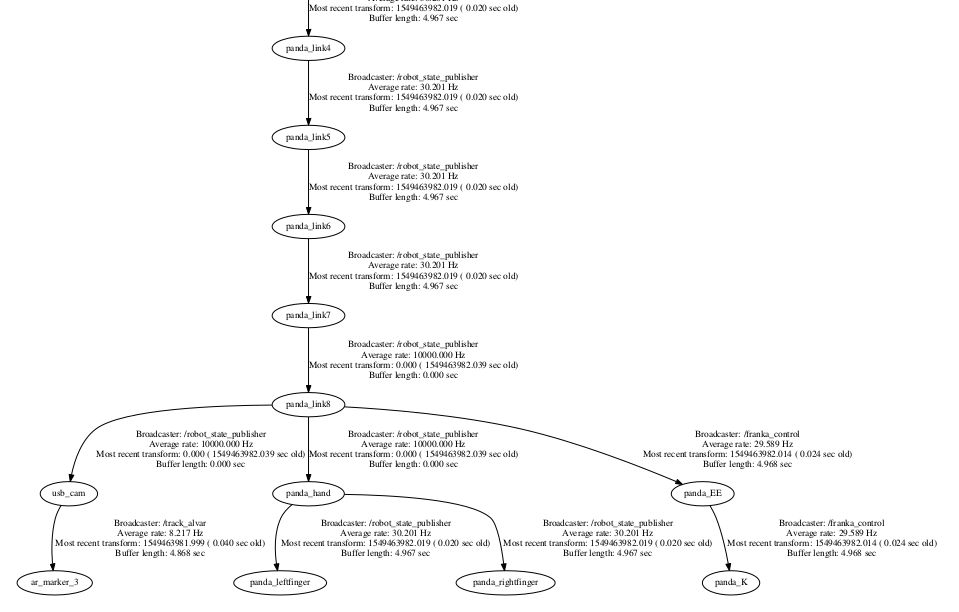
| 2019-02-07 03:51:42 -0500 | marked best answer | How to retrieve absolute pose in ROS Hello, i'm currently doing the detection of ArUco and Alvar fiducial markers (glued on a cube), by that trying to grasp the cube with the detection of the marker. The camera is mounted on the Panda from Franka Emika, which is controlled by ROS with the aid of ROS MoveIt! (I'm sending some joint_values to the robot so we can kind of scan the table where he is on). There's a link to a video where one can see what i'm really doing. Link: https://youtu.be/oiPJZO2T00k Technical part:
I want to retrieve the absolute pose of the marker, i.e the transform from my first frame, in this case I think this question maybe not specific to ROS but robotics in general, but i'm quite in a dead end so any helpful would be nice! Thanks! Pictures of the tf_tree if it helps..
|
| 2019-02-07 03:51:00 -0500 | answered a question | How to retrieve absolute pose in ROS Hey, thanks! I managed to fix it. Actually the timestamps were correct, my tf_tree wasn't completely right, that was it. |
| 2019-02-07 03:05:51 -0500 | received badge | ● Popular Question (source) |
| 2019-02-06 16:36:14 -0500 | edited question | How to retrieve absolute pose in ROS How to retrieve absolute pose in ROS Hello, i'm currently doing the detection of ArUco and Alvar fiducial markers (glue |
| 2019-02-06 16:31:56 -0500 | asked a question | How to retrieve absolute pose in ROS How to retrieve absolute pose in ROS Hello, i'm currently doing the detection of ArUco and Alvar fiducial markers (glue |
| 2019-01-31 04:49:36 -0500 | received badge | ● Notable Question (source) |
| 2019-01-31 03:51:55 -0500 | received badge | ● Teacher (source) |
| 2019-01-31 03:51:55 -0500 | received badge | ● Self-Learner (source) |
| 2019-01-31 02:40:59 -0500 | marked best answer | Aruco Detection: operating the inverse of the Pose results in strange value for Translation Hello, i'm currently detecting the ArUco Marker with the help of the ros_aruco package. The detection works perfectly, i assume. by doing:
By looking to the Z-Axis we can confirm that it's reading correctly, and the x and y as well (the marker is almost on the center of the camera). But this is the result of the transformation The way i do it: Inverse of a Pose is given by: the inverse of a homogeneous transformation. Which eventually is just operating:
What i get: Which doesn't make sense because Z should maintain to be around 0.54. Does anybody know why the result is looking so strange? Here is the snippet of the code: |
| 2019-01-31 02:37:16 -0500 | edited question | Aruco Detection: operating the inverse of the Pose results in strange value for Translation Aruco Detection: operating the inverse of the Pose results in strange value for Translation Hello, i'm currently detect |
| 2019-01-31 02:36:46 -0500 | edited question | Aruco Detection: operating the inverse of the Pose results in strange value for Translation Aruco Detection: operating the inverse of the Pose results in strange value for Translation Hello, i'm currently detect |
| 2019-01-31 02:36:19 -0500 | edited question | Aruco Detection: operating the inverse of the Pose results in strange value for Translation Aruco Detection: operating the inverse of the Pose results in strange value for Translation Hello, i'm currently detect |
| 2019-01-31 02:35:58 -0500 | answered a question | Aruco Detection: operating the inverse of the Pose results in strange value for Translation As @gvdhoorn and @PeteBlackerThe3rd answered on the comments, there was a built in function from /tf which is called inv |
| 2019-01-30 10:56:50 -0500 | commented question | Aruco Detection: operating the inverse of the Pose results in strange value for Translation ROS never fails to surprise me, very nice! Thank you both for the help! About the lookUp(): exactly like Pete said! |
| 2019-01-30 10:35:20 -0500 | received badge | ● Popular Question (source) |
| 2019-01-30 08:27:56 -0500 | commented question | Aruco Detection: operating the inverse of the Pose results in strange value for Translation -> then ROS identified automatically that in order to the relation marker->camera to be valid, it should be inver |
| 2019-01-30 08:26:03 -0500 | commented question | Aruco Detection: operating the inverse of the Pose results in strange value for Translation Hi, thank you both for the quick response. I actually didn't know about this function from /tf package. Conclusion: I th |
| 2019-01-29 07:57:59 -0500 | asked a question | Aruco Detection: operating the inverse of the Pose results in strange value for Translation Aruco Detection: operating the inverse of the Pose results in strange value for Translation Hello, i'm currently detect |
| 2019-01-17 10:49:05 -0500 | received badge | ● Notable Question (source) |
| 2019-01-07 02:36:04 -0500 | received badge | ● Notable Question (source) |
| 2018-12-12 07:48:33 -0500 | received badge | ● Popular Question (source) |
| 2018-12-12 06:23:52 -0500 | answered a question | Problem while Launching MoveIt! library loading error Managed to fix it by trial and error. I suppose some OpenCV3 .so files from ROS were somehow conflicting with the OpenCV |
| 2018-12-07 04:53:18 -0500 | edited question | Problem while Launching MoveIt! library loading error Problem while Launching MoveIt! library loading error Hello. I'm using ROS Kinetic. For some reason there is a problem l |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.