
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2019-06-27 14:24:21 -0500 | received badge | ● Famous Question (source) |
| 2019-05-20 02:10:05 -0500 | marked best answer | When using navsat_transform_node, isn't it a problem to use IMU yaw to compute transform between map and base_link ? Hello, In this video from Tom Moore at time 12:36, I can see that he sets IMU yaw to true. The consequence of this is that as soon as the robot is started, there is an non zero angle between base_link and map, with X axis of map pointing to the east (except if robot is facing east of course).
I think there is an inconsistency with what this picture says Can you please point me my mistake, and if there is no mistake, how should map and base_link be related when using navsat_transform_node ? Thank you Yvon |
| 2018-03-07 06:01:42 -0500 | received badge | ● Notable Question (source) |
| 2017-11-29 23:22:29 -0500 | received badge | ● Popular Question (source) |
| 2017-11-06 18:53:19 -0500 | marked best answer | What is good practice to fuse pose from a unique odom message in robot_localization in both ekf_se_odom and ekf_se_map ? Hello, I am fusing odometry from a lidar (I have it thanks to undocumented pub_odometry parameter of hector_slam), IMU and GPS data. I am using the dual_ekf_navsat_example. My odom message has no twist information, only pose. So that it is taken into account by ekf_se_odom, I need to publish it with frame_id = odom, because world_map of ekf_se_odom is odom. Then, if I want my odom message to be fused again in ekf_se_map, I need to publish it with frame_id = map, because world_map of ekf_se_map is map. So... I guess I have to duplicate my odom message... am I right or am I missing something ? Yvon |
| 2017-10-25 05:19:33 -0500 | received badge | ● Famous Question (source) |
| 2017-09-24 13:19:32 -0500 | received badge | ● Notable Question (source) |
| 2017-08-15 09:40:42 -0500 | received badge | ● Famous Question (source) |
| 2017-07-14 11:33:00 -0500 | received badge | ● Popular Question (source) |
| 2017-07-07 11:12:56 -0500 | received badge | ● Notable Question (source) |
| 2017-07-02 17:58:53 -0500 | received badge | ● Popular Question (source) |
| 2017-06-30 12:11:58 -0500 | answered a question | What is good practice to fuse pose from a unique odom message in robot_localization in both ekf_se_odom and ekf_se_map ? Well, I've just checked it one more time : pose with frame_id = odom not used by ekf_se_map with world_frame = map but u |
| 2017-06-30 08:55:09 -0500 | asked a question | When using navsat_transform_node, isn't it a problem to use IMU yaw to compute transform between map and base_link ? When using navsat_transform_node, isn't it a problem to use IMU yaw to compute transform between map and base_link ? Hel |
| 2017-06-30 08:41:30 -0500 | edited question | How can navsat_transform_node deal with base_link and map not aligned when GPS data is received ? How can navsat_transform_node deal with base_link and map not aligned when GPS data is received ? Hello, I do not unders |
| 2017-06-30 08:40:37 -0500 | asked a question | How can navsat_transform_node deal with base_link and map not aligned when GPS data is received ? How can navsat_transform_node deal with base_link and map not aligned when GPS data is received ? Hello, I do not unders |
| 2017-06-30 08:20:54 -0500 | commented answer | Yaw problem for IMU fusinon in robot_localization This : "world-fixed reference frames like odom and map are always orientated so that the 'Y' axis faces magnetic north" |
| 2017-06-30 08:20:13 -0500 | commented answer | Yaw problem for IMU fusinon in robot_localization This : "world-fixed reference frames like odom and map are always orientated so that the 'Y' axis faces magnetic north" |
| 2017-06-29 07:08:58 -0500 | commented question | What is good practice to fuse pose from a unique odom message in robot_localization in both ekf_se_odom and ekf_se_map ? Not sure you got it. My pb is strongly linked to this simpler question : will an instance of robot_state_estimator with |
| 2017-06-28 07:02:24 -0500 | asked a question | What is good practice to fuse pose from a unique odom message in robot_localization in both ekf_se_odom and ekf_se_map ? What is good practice to fuse pose from a unique odom message in robot_localization in both ekf_se_odom and ekf_se_map ? |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
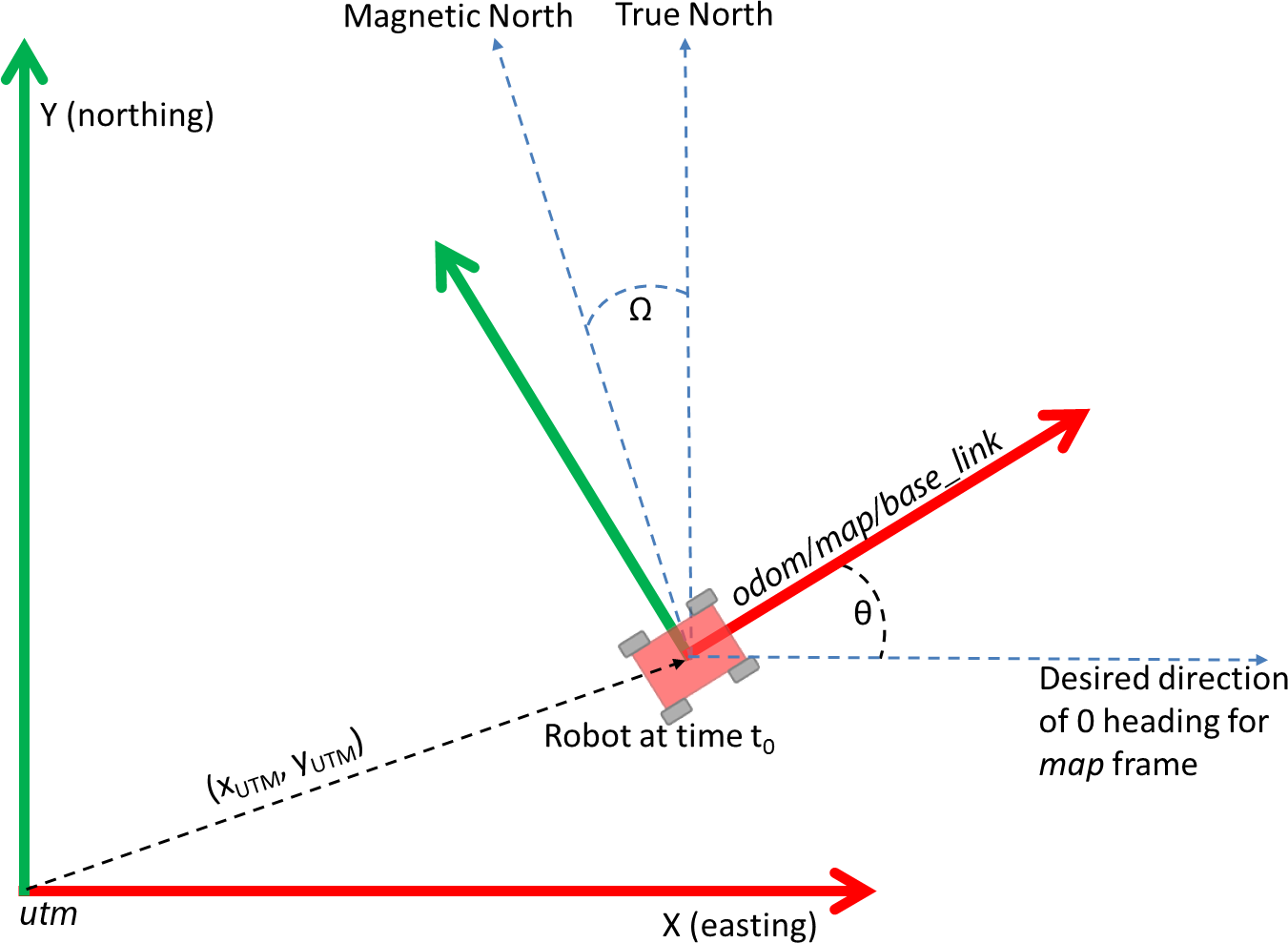 . I understand here that map and base_link should be aligned at start so that navsat_transform_node can properly compute a transform between utm and map, thanks to the theta angle given by the IMU.
Having map and base_link aligned is mandatory because the IMU reports the angle between base_link and east.
. I understand here that map and base_link should be aligned at start so that navsat_transform_node can properly compute a transform between utm and map, thanks to the theta angle given by the IMU.
Having map and base_link aligned is mandatory because the IMU reports the angle between base_link and east.