
When using navsat_transform_node, isn't it a problem to use IMU yaw to compute transform between map and base_link ?
Hello,
In this video from Tom Moore at time 12:36, I can see that he sets IMU yaw to true. The consequence of this is that as soon as the robot is started, there is an non zero angle between base_link and map, with X axis of map pointing to the east (except if robot is facing east of course).
I think there is an inconsistency with what this picture says 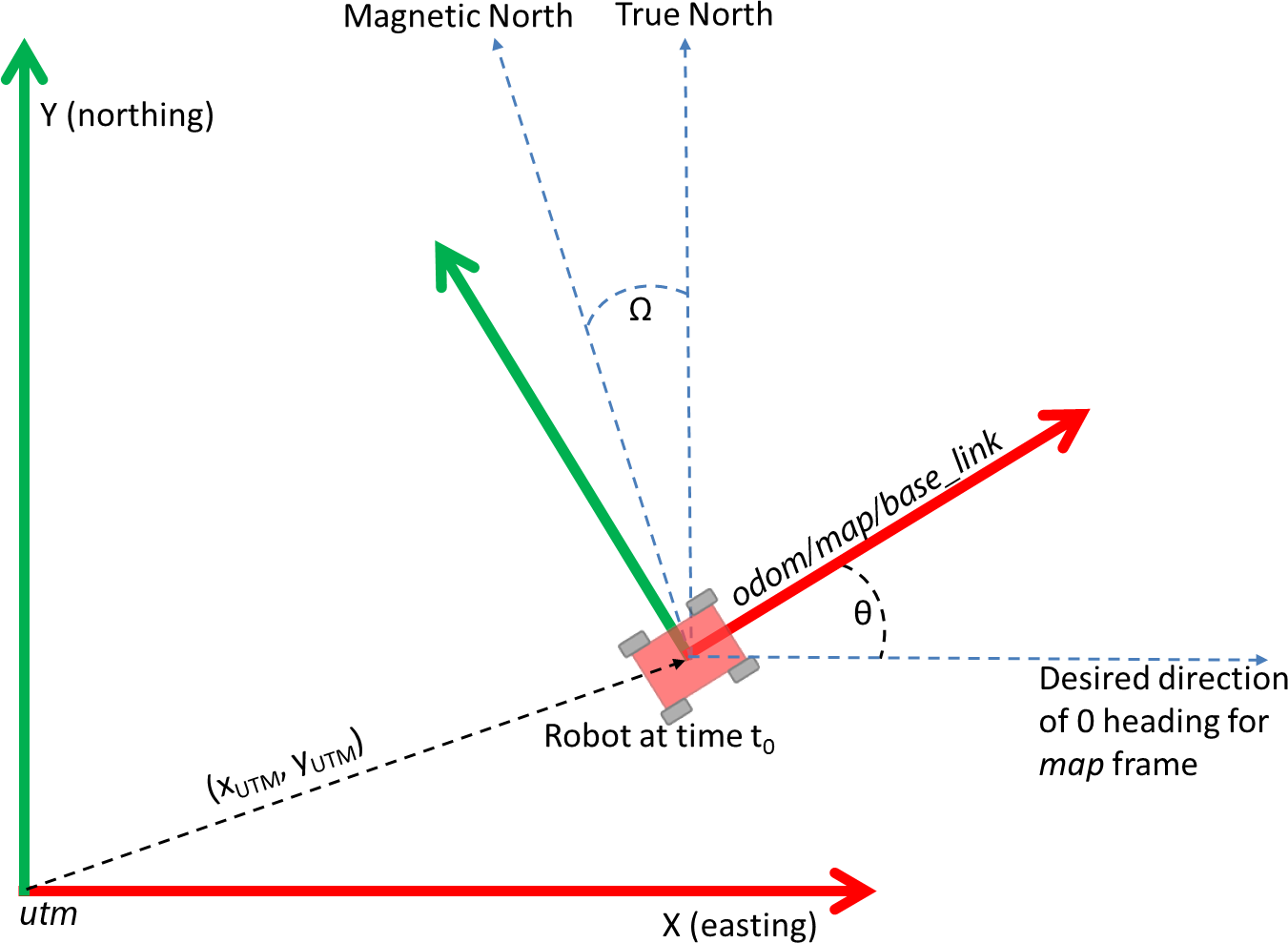 . I understand here that map and base_link should be aligned at start so that navsat_transform_node can properly compute a transform between utm and map, thanks to the theta angle given by the IMU.
Having map and base_link aligned is mandatory because the IMU reports the angle between base_link and east.
. I understand here that map and base_link should be aligned at start so that navsat_transform_node can properly compute a transform between utm and map, thanks to the theta angle given by the IMU.
Having map and base_link aligned is mandatory because the IMU reports the angle between base_link and east.
Can you please point me my mistake, and if there is no mistake, how should map and base_link be related when using navsat_transform_node ?
Thank you
Yvon

