The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |

| 2019-07-15 07:51:22 -0500 | received badge | ● Famous Question (source) |
| 2017-02-15 07:42:48 -0500 | commented question | Filtering topic data stream by accesing raw packets Done. Thank you again, gvdhoorn. |
| 2017-02-15 07:41:54 -0500 | received badge | ● Editor (source) |
| 2017-02-15 07:36:20 -0500 | received badge | ● Scholar (source) |
| 2017-02-15 07:35:08 -0500 | received badge | ● Notable Question (source) |
| 2017-02-15 04:41:18 -0500 | answered a question | Filtering topic data stream by accesing raw packets This post has been answered by @gvdhoorn in the comments under the main question. |
| 2017-02-15 04:39:20 -0500 | commented question | Filtering topic data stream by accesing raw packets Thank you @gvdhoonr, you've already given us plenty of useful information to start working with. I consider all your comments made more than a full answer so I'll add an answer redirecting to these comments. Regards. |
| 2017-02-14 12:10:27 -0500 | received badge | ● Popular Question (source) |
| 2017-02-14 11:52:51 -0500 | commented question | Filtering topic data stream by accesing raw packets Ok, I'll try to talk them into ROS2. Appreciate your help, @gdvhoorn. Just to see if I understood correctly. Once the topics are negotiated, the only way to differentiate one data stream from one topic to another one is to check the TCP ports, is this right? |
| 2017-02-14 11:52:43 -0500 | commented question | Filtering topic data stream by accesing raw packets "Raw images" i know... They only sent us one bag for testing. I guess they will compress the video in the near future. |
| 2017-02-14 10:55:14 -0500 | commented question | Filtering topic data stream by accesing raw packets Well, I do really appreciate your helpful "non-answers" ;) -> About the UDP Bridge: that's mainly what our radio platforms do. I'll try to check DRC projects. -> About tracking IP:PORT: I guess that's our only choice to implement within the radio platform. But it doesn't seem too straight forward. |
| 2017-02-14 10:55:08 -0500 | commented question | Filtering topic data stream by accesing raw packets ->About ROS graph sections: not sure what that is,I'll check it out. Nevertheless it sounds like it has to do with endpoints (it's a base station and an UAV), for which we don't have access. Not all ~75 topics are actually needed, only those with high priority (probably UAV command and control data) |
| 2017-02-14 10:55:01 -0500 | commented question | Filtering topic data stream by accesing raw packets ->ROS2/DDS: I forgot to mention we don't have access to the endpoints, as they belong to another company and ROS version is fixed. We are only in charge of the radio platforms and RF link. To inform us which topics are high priority they appended a prefix to each topic, like: /high/flir/imageraw |
| 2017-02-14 08:27:25 -0500 | commented question | Filtering topic data stream by accesing raw packets When the RF link is saturated (bottleneck) we need to lower the traffic, dropping packets from low priority topics. Ideally TCP would try to resend this packets and our RF link should be able to send them eventually. Anyway, simply put: Yes, we want to lower the traffic on our radio-link. |
| 2017-02-14 08:23:46 -0500 | commented question | Filtering topic data stream by accesing raw packets My TCPROS jargon wasn't accurate enough. I edited the question accordingly. I have the same example, camera and viewer, and roscore is running in the same host as the viewer is. Once connections are negotiated, topic datastreams are flowing through the RF link, and I'd like to apply topic filtering |
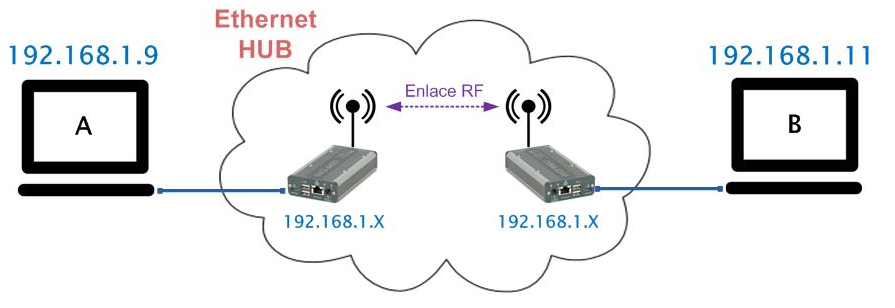
| 2017-02-14 04:22:58 -0500 | asked a question | Filtering topic data stream by accesing raw packets Hi everyone, [Kinetic 1.12.6, Ubuntu 16.04 kernel 4.4.062-generic] We've got the following system topology:
The radio platforms act like a HUB so endpoint nodes see each other like if they were directly connected by an ethernet cable. Our radio platforms are embedded devices that don't understand TCPROS protocol, they are just configured in promiscous mode to move traffic from ethernet interface to RF interface and viceversa. Now here comes the problem: we have ~75 topics and we want our radio platforms to be able to filter TCPROS traffic by TOPIC, so we can define high or low priority topics. How can we differentiate which packet corresponds to each topic? As far as I understand, client-master negotiate what port they are going to use for each topic and then the datastream from each topic is sent to its assigned port. In other words, my only way to filter data stream from one topic would be to keep a track of assigned ports (when topics are published) and then check every "destination port" field within TCP header? Does this make sense? or is there any easier way? Regards, -Leroy |
| 2017-02-14 03:34:01 -0500 | received badge | ● Supporter (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.