The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |

| 2022-09-13 07:20:37 -0500 | received badge | ● Good Question (source) |
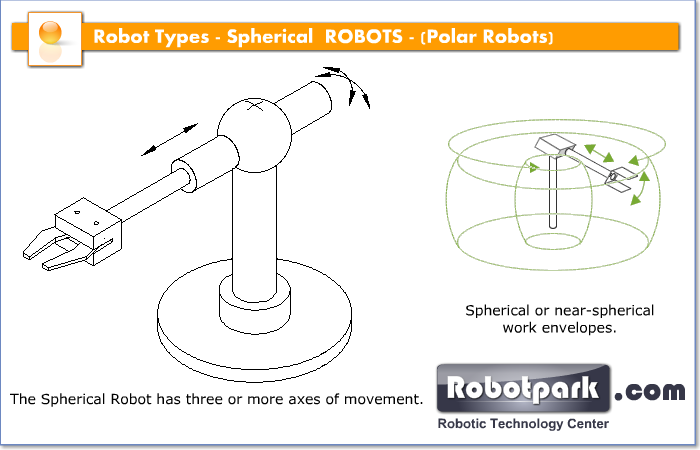
| 2019-04-03 21:27:34 -0500 | marked best answer | Move It! polar robot configuration not moving second joint Hi all! I'm fighting to create a polar robot configuration with Move It. The polar robot has 3 joints: rotational, rotational and prismatic.
I have model it in a xacro file and can move it with problems in Rviz with fake controllers. Here is the xacro file of the robot (be care to uncomment the lines for the joint with the world) link And for launch it, this is the command: Then I follow the MoveIt! tutorial for a custom robot (link) and generate all the files correctly, but as you can see in the next video, it only moves the first joint (rotational) and the third joint (prismatic), but not the second one (rotational). Video And for launch it, this is the command: I would apreciate some help in trying to fix this problem. Kinds regards, Jorge EDIT: This is the workspace for all the project. |
| 2019-04-03 21:24:29 -0500 | received badge | ● Famous Question (source) |
| 2019-04-03 21:24:29 -0500 | received badge | ● Notable Question (source) |
| 2019-03-02 06:36:32 -0500 | received badge | ● Famous Question (source) |
| 2019-03-02 06:36:32 -0500 | received badge | ● Notable Question (source) |
| 2019-02-23 00:10:50 -0500 | received badge | ● Nice Question (source) |
| 2019-01-21 04:10:00 -0500 | received badge | ● Famous Question (source) |
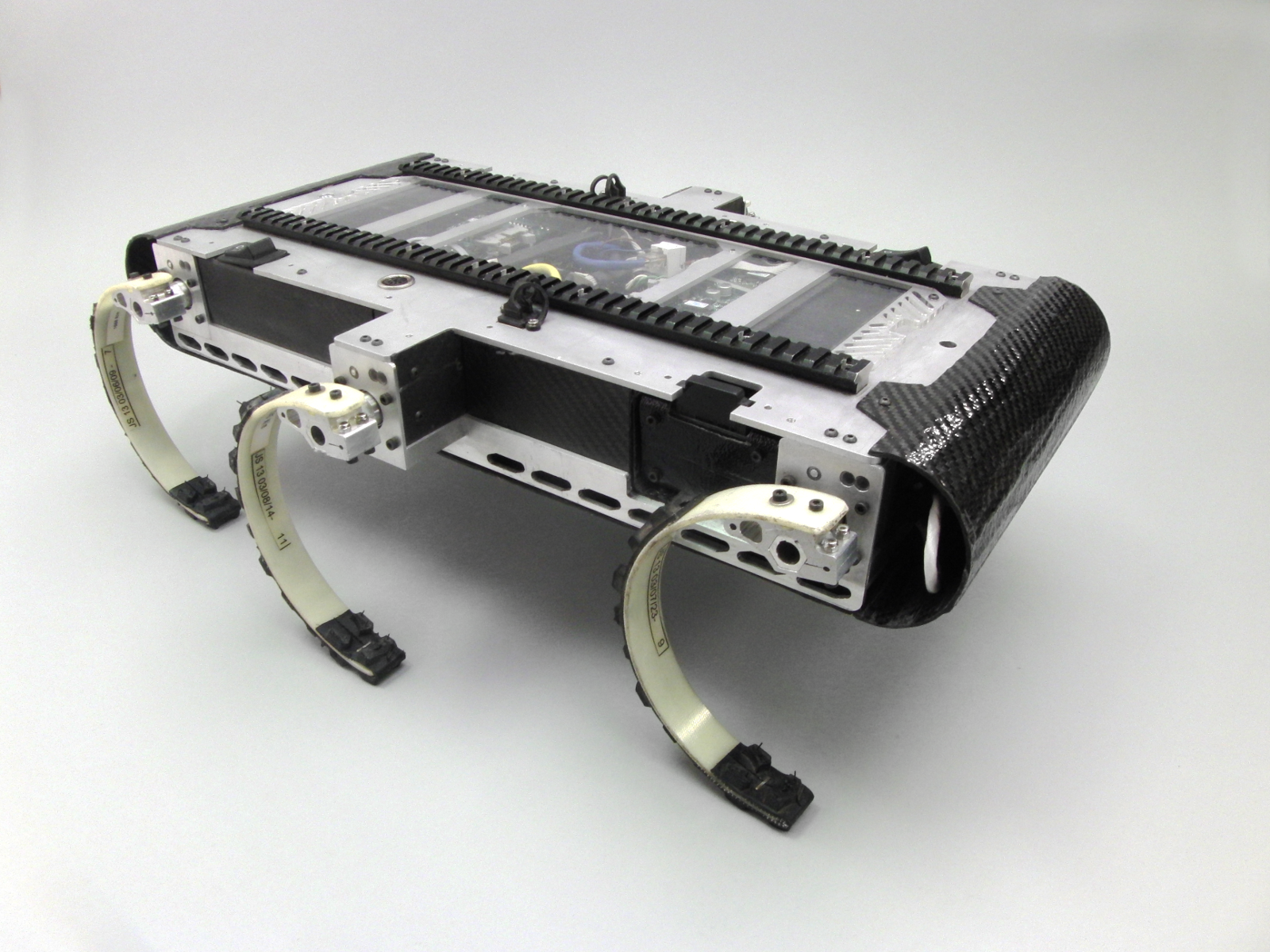
| 2018-12-10 09:52:49 -0500 | marked best answer | How to control Maxon MCD Epos with ROS_canopen and IXXAT adapter Important Edit: for ROS CANopen you don't need to load the controllers, only the URDF file of the motor to get the joints and specifications of it. Hi all, I am trying to build an RHex style robot.
For it locomotion I have selected 6 Maxon MCD Epos motors. That are connected via CAN with an IXXAT USB-to-CAN adapter.
First of all, I try to manage the MCD with the package epos_hardware ( link ), I get all the motors work but with a different configuration (the first one via USB-RS232 to the computer and then it generates a CAN network with the others motors). The problem is that the frequency to control the motors is only 3 Hz and I need at least 20 Hz. So, having try ros package epos_hardware and testing that it can't connect to Maxon motors via Canopen I am trying to use ros_canopen package ( can_open ) and following the instructions from Mathias (Instructions) But I'm having the same errors that CJ. And also, some errors with the controllers I follow all the steps that Mathias explain in the other question.
bus: nodes: |
| 2018-11-30 02:00:21 -0500 | received badge | ● Famous Question (source) |
| 2018-11-29 20:19:23 -0500 | commented answer | Error: Joint is missing a parent and/or child -> No TF data And with this form: <xacro:fotokite_arm parent="world"> <origin xyz="0 0 0" rpy="0 0 0" /> </xac |
| 2018-11-29 20:18:18 -0500 | commented answer | Error: Joint is missing a parent and/or child -> No TF data I have add to the question my launch file and the macro file that calls the one with the macro. I have also try to cal |
| 2018-11-29 20:14:51 -0500 | edited question | Error: Joint is missing a parent and/or child -> No TF data Error: Joint is missing a parent and/or child -> No TF data Hi all, I'm trying to build a robotic arm, but I'm havi |
| 2018-11-29 10:57:58 -0500 | commented answer | Error: Joint is missing a parent and/or child -> No TF data If I modify the code with your EDIT4 and launching only this xacro, I still can't get more TFs than the world and the mo |
| 2018-11-29 10:56:29 -0500 | commented answer | Error: Joint is missing a parent and/or child -> No TF data If I modify the code with your EDIT4 and launching only this xacro, I still can't get more TFs than the world and the mo |
| 2018-11-29 10:47:20 -0500 | commented answer | Error: Joint is missing a parent and/or child -> No TF data I have in another xacro what you say: <!--Import Fotokite arm --> <xacro:include filename="$(find arm_descript |
| 2018-11-28 22:23:28 -0500 | commented answer | Error: Joint is missing a parent and/or child -> No TF data If try changing the links (visual and collision) to the standard xacro form, and neither I can't get the TFs. I update |
| 2018-11-28 21:32:31 -0500 | edited question | Error: Joint is missing a parent and/or child -> No TF data Error: Joint is missing a parent and/or child -> No TF data Hi all, I'm trying to build a robotic arm, but I'm havi |
| 2018-11-28 21:31:53 -0500 | edited question | Error: Joint is missing a parent and/or child -> No TF data Error: Joint is missing a parent and/or child Hi all, I'm trying to build a robotic arm, but I'm having troubles when |
| 2018-11-28 21:31:47 -0500 | commented question | Error: Joint is missing a parent and/or child -> No TF data Hi @Delb, I had the same error if I try to convert to URDF. |
| 2018-11-28 21:31:08 -0500 | edited question | Error: Joint is missing a parent and/or child -> No TF data Error: Joint is missing a parent and/or child Hi all, I'm trying to build a robotic arm, but I'm having troubles when |
| 2018-11-28 16:39:46 -0500 | commented answer | Error: Joint is missing a parent and/or child -> No TF data Hi @FelipeNascimiento, finally your solution is right!! But the problem is that now I can't get the TFs of the robot, I |
| 2018-11-28 14:02:39 -0500 | received badge | ● Notable Question (source) |
| 2018-11-28 10:35:19 -0500 | commented answer | Error: Joint is missing a parent and/or child -> No TF data Hi @FelipeNascimiento, with your modification and don't have the error, but now I have this one: Error [parser_urdf.cc: |
| 2018-11-27 12:50:18 -0500 | received badge | ● Popular Question (source) |
| 2018-11-26 18:56:16 -0500 | commented question | Error: Joint is missing a parent and/or child -> No TF data If I comment the first if for the child <!--xacro:if value="${parent != 'length'}"--> <child link="${pr |
| 2018-11-26 18:49:57 -0500 | commented answer | Error: Joint is missing a parent and/or child -> No TF data I have edit the question, the macro definition was not insert as code. Now you can see that I declare the child variable |
| 2018-11-26 18:49:47 -0500 | commented answer | Error: Joint is missing a parent and/or child -> No TF data I have edit the question, the macro definition was not insert as code. Now you can see that I declare the child variable |
| 2018-11-26 18:49:37 -0500 | commented answer | Error: Joint is missing a parent and/or child -> No TF data I have edit the question, the macro definition was not insert as code. Now you can see that I declare the child variable |
| 2018-11-26 18:47:23 -0500 | edited question | Error: Joint is missing a parent and/or child -> No TF data Error: Joint is missing a parent and/or child Hi all, I'm trying to build a robotic arm, but I'm having troubles when |
| 2018-11-26 15:14:20 -0500 | asked a question | Error: Joint is missing a parent and/or child -> No TF data Error: Joint is missing a parent and/or child Hi all, I'm trying to build a robotic arm, but I'm having troubles when |
| 2018-10-29 02:13:16 -0500 | received badge | ● Popular Question (source) |
| 2018-10-11 16:39:07 -0500 | asked a question | MoveIt! 2 arms joint MoveIt! 2 arms joint Hi all! I'm trying to create with MoveIt! a modular robotic arm but that each module can be control |
| 2018-10-11 15:21:07 -0500 | received badge | ● Notable Question (source) |
| 2018-10-11 01:35:47 -0500 | received badge | ● Popular Question (source) |
| 2018-10-09 16:17:20 -0500 | marked best answer | Trajectory MultiDOF to file Hi all! I'm getting stuck trying to save the trajectory generate by MoveIt to a file. The trajectory is generated correctly and the robot moves right in RViz.
Also, I can open a file and write that in it. But I can't obtain the data of the trajectory. If I read the data with: I get a value, that I don't know what it means, and also is only one point, no three for the X, Y, and Z of the joint. If I try with: I can compile my code, but I get an error when executing the program. The error code is -11. Here is the workspace of my project. And to launch it you need two terminals:
Thank you, Jorge |
| 2018-10-09 16:16:56 -0500 | answered a question | Trajectory MultiDOF to file The solution is made of two answer: - question #277954 -> store data into file - question #246678 -> transform the |
| 2018-10-09 16:12:39 -0500 | commented answer | Trajectory MultiDOF to file Hi @PeteBlackerThe3rd I have get it with the help of this question https://answers.ros.org/question/246678/solved-forwar |
| 2018-10-09 16:11:03 -0500 | received badge | ● Popular Question (source) |
| 2018-10-09 15:28:28 -0500 | commented answer | How do I control / acquire the tilt angle of kinect v1? I am using freenect on ROS kinetic. Hi @meghdeepj, could finally control the tilt angle? |
| 2018-10-09 08:17:13 -0500 | commented answer | Trajectory MultiDOF to file Hi @PeteBlacketThe3rd, thank you for your answer. I have a 7 DOF arm. Which is RRR-P-RRR. And what about using the tr |
| 2018-10-08 10:37:19 -0500 | asked a question | Trajectory MultiDOF to file Trajectory MultiDOF to file Hi all! I'm getting stuck trying to save the trajectory generate by MoveIt to a file. Th |
| 2018-10-08 06:17:32 -0500 | received badge | ● Famous Question (source) |
| 2018-10-05 10:27:14 -0500 | answered a question | How to move 2 robots in linux? Here you can find a good example to control 3 Robotnik Summits, which are 3 wheel robots. Repository |
| 2018-10-04 17:27:58 -0500 | commented question | How to get waypoints of a trajectory? But I have one question. The data that is in the file, should be in which format? If I only want to get the position of |
| 2018-10-04 17:23:58 -0500 | commented question | How to get waypoints of a trajectory? Hi @PeteBlackerThe3rd I have implemented your code and it's working. I change some things, for example: while (count & |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.