The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2022-10-04 20:18:21 -0500 | received badge | ● Good Answer (source) |
| 2022-06-18 01:59:51 -0500 | received badge | ● Famous Question (source) |
| 2022-04-06 04:11:45 -0500 | received badge | ● Good Answer (source) |
| 2021-11-08 11:39:01 -0500 | marked best answer | How to configure /clock topic in launch file - costmap_2d Hi, I have this case, when I use So I supposed was something related with /clock topic. Comparing What should I do to correctly run this node from .launch file? |
| 2021-11-08 11:39:01 -0500 | received badge | ● Self-Learner (source) |
| 2021-06-23 06:45:14 -0500 | received badge | ● Notable Question (source) |
| 2021-05-01 09:16:06 -0500 | received badge | ● Popular Question (source) |
| 2021-04-27 08:18:14 -0500 | edited question | How to differentiate float vs fix status in an RTK system? How to differentiate float vs fix status in an RTK system? As mentioned in this question , the NavSatStatus message has |
| 2021-04-27 06:31:12 -0500 | edited question | How to differentiate float vs fix status in an RTK system? How to differentiate float vs fix status in an RTK system? As mentioned in this question , the NavSatStatus message has |
| 2021-04-27 06:30:22 -0500 | asked a question | How to differentiate float vs fix status in an RTK system? How to differentiate float vs fix status in an RTK system? As mentioned in this question , the NavSatStatus message has |
| 2021-03-11 12:09:15 -0500 | commented question | How to determine if absolute orientation of IMU + magnetometer is correct? What have you done so far or what is your setup? |
| 2020-07-23 10:23:46 -0500 | commented question | nmea_navsat_driver ROS package and Emlid Reach GPS units Hi @popenc, Any update on this issue? Did you find an answer? |
| 2020-07-10 02:16:07 -0500 | received badge | ● Notable Question (source) |
| 2020-07-10 02:16:07 -0500 | received badge | ● Famous Question (source) |
| 2020-04-02 05:23:24 -0500 | received badge | ● Popular Question (source) |
| 2020-04-01 14:08:59 -0500 | marked best answer | Using ROS Melodic with Python 3 I'm trying to install ROS M following the installation instructions,. I installed the desktop configuration, but when tried step 1.6, I'm using Ubuntu 18.04 EDIT: If I try to install |
| 2020-04-01 13:45:20 -0500 | commented question | Using ROS Melodic with Python 3 @gvdhoorn Thanks for your explanation. It is clear now. |
| 2020-04-01 09:00:06 -0500 | commented question | ROS Melodic Python 3 Source Did you get it working in the end? |
| 2020-04-01 08:50:40 -0500 | edited question | Using ROS Melodic with Python 3 Using ROS Melodic with Python 3 I'm trying to install ROS M following the installation instructions,. I installed the de |
| 2020-04-01 08:25:01 -0500 | edited question | Using ROS Melodic with Python 3 Using ROS Melodic with Python 3 I'm trying to install ROS M following the installation instructions,. I installed the de |
| 2020-04-01 06:59:55 -0500 | asked a question | Using ROS Melodic with Python 3 Using ROS Melodic with Python 3 I'm trying to install ROS M following the installation instructions, but when tried step |
| 2020-03-25 10:38:13 -0500 | commented question | rosdep not found after installing melodic sure. Thanks. |
| 2020-03-25 10:37:45 -0500 | received badge | ● Popular Question (source) |
| 2020-03-25 07:22:48 -0500 | edited question | rosdep not found after installing melodic rosdep not found after installing melodic Hi, I just followed the installation tutorial for Melodic on Ubuntu 18.04 (lin |
| 2020-03-25 07:09:17 -0500 | edited question | rosdep not found after installing melodic rosdep not found after installing melodic Hi, I just followed the installation tutorial for Melodic on Ubuntu 18.04 (lin |
| 2020-03-25 07:08:48 -0500 | asked a question | rosdep not found after installing melodic rosdep not found after installing melodic Hi, I just followed the installation tutorial for Melodic on Ubuntu 18.04 (lin |
| 2020-03-24 17:47:40 -0500 | received badge | ● Great Answer (source) |
| 2020-01-28 07:33:07 -0500 | received badge | ● Good Answer (source) |
| 2019-03-18 07:56:09 -0500 | received badge | ● Nice Answer (source) |
| 2018-07-26 16:15:24 -0500 | received badge | ● Necromancer (source) |
| 2018-07-24 03:13:27 -0500 | edited answer | ImportError: No module named rospkg (python3) <SOLVED> This is what worked for me: sudo apt-get install python3-catkin-pkg-modules sudo apt-get install python3-rospkg-modules |
| 2018-07-23 08:29:20 -0500 | edited answer | What is the difference between a topic and a message? As you said, the topic is the channel where nodes are subscribed for to read messages or where the nodes publish those m |
| 2018-07-23 08:28:55 -0500 | edited answer | What is the difference between a topic and a message? As you said, the topic is the channel where nodes are subscribed for to read messages or where the nodes publish those m |
| 2018-07-23 05:37:03 -0500 | answered a question | ImportError: No module named rospkg (python3) <SOLVED> This is what worked for me: sudo apt-get install python3-catkin-pkg-modules sudo apt-get install python3-rospkg-modules |
| 2018-05-17 17:53:06 -0500 | received badge | ● Good Answer (source) |
| 2017-04-10 07:09:52 -0500 | received badge | ● Self-Learner (source) |
| 2017-01-30 22:51:34 -0500 | received badge | ● Great Answer (source) |
| 2017-01-30 22:51:34 -0500 | received badge | ● Guru (source) |
| 2017-01-26 11:51:32 -0500 | received badge | ● Famous Question (source) |
| 2016-12-11 15:56:13 -0500 | marked best answer | Can't plot some messages types on rqt_plot Hi, I'm trying to plot some messages but this warning appears at executing rqt_plot: and in general: If I execute rqt_plot with the data I want to plot ( Someone can help me with this? I can plot data over some topics, so, Is there something that I have to do before? I'm using Hydro and Ubuntu 12.04 |
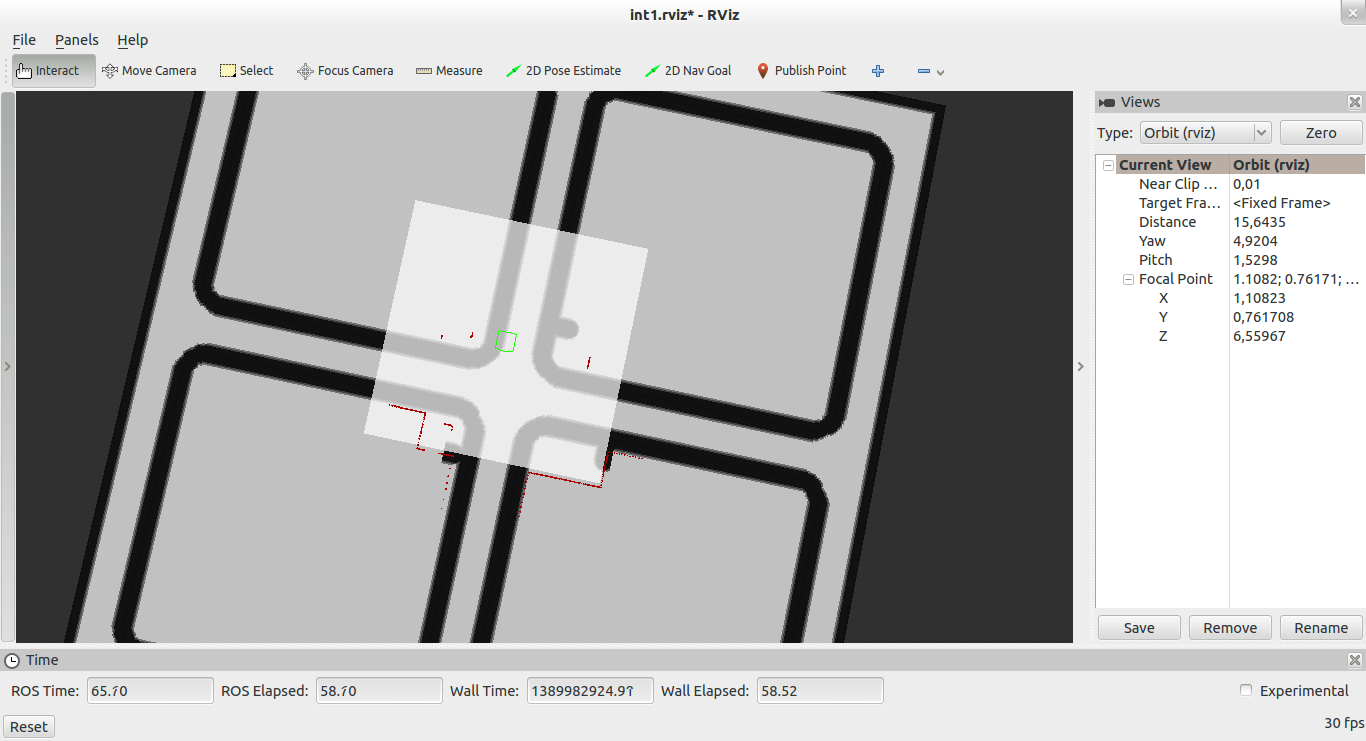
| 2016-11-07 23:16:21 -0500 | marked best answer | local costmap empty using move_base_node Hi, I'm using move_base_node in stage, and I've found that local costmap is empty. In this picture from rviz I can see that global costmap is fine but local costmap (the small square) is empty. The red dots are the laser scans from robot (green footprint) with which the local costmap should be generated. Is something wrong with this? Because although of this I can set goals and the robot can reach them. EDIT 1: Although the robot can reach the goals, it does it at a very low speed, even if I increase the value of EDIT 2: If I change for where EDIT 3: This is my TF tree; base_* are "robots" on each corner of the intersection; I say "robots" because I use them as static lasers. And car_* are robots navigating as vehicles, in this case car_0 is the green polygon.
Here are the parameters I use: costmap_common file: global_costmap file: |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.