
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2018-09-17 12:21:47 -0500 | received badge | ● Good Question (source) |
| 2018-03-26 21:28:32 -0500 | received badge | ● Nice Question (source) |
| 2016-09-08 06:28:30 -0500 | received badge | ● Student (source) |
| 2015-11-26 10:49:05 -0500 | received badge | ● Enthusiast |
| 2015-11-23 13:57:08 -0500 | received badge | ● Famous Question (source) |
| 2015-11-23 13:02:43 -0500 | commented answer | Rviz: Fixed frame [Map] does not exist I added my launch file. It looks like it contains all of them. I just copy-pasted from the tutorial, changed map location. |
| 2015-11-23 13:01:18 -0500 | received badge | ● Editor (source) |
| 2015-11-23 04:40:18 -0500 | received badge | ● Notable Question (source) |
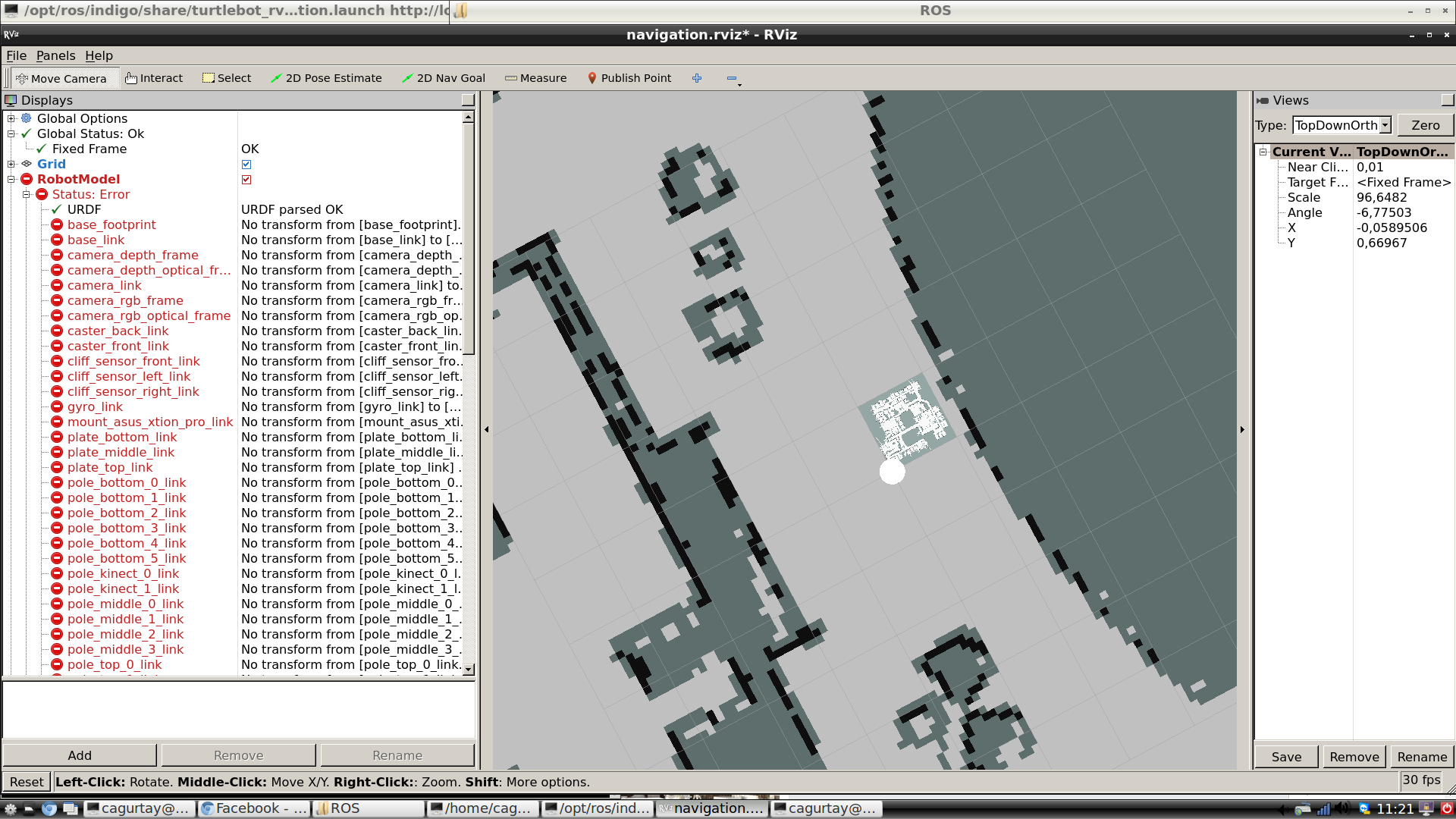
| 2015-11-23 03:36:12 -0500 | commented answer | Rviz: Fixed frame [Map] does not exist I don't even know how to change it. I tried your solution, it fixes "Global Status" but there still is RobotModel error: Screenshot |
| 2015-11-23 03:00:18 -0500 | received badge | ● Popular Question (source) |
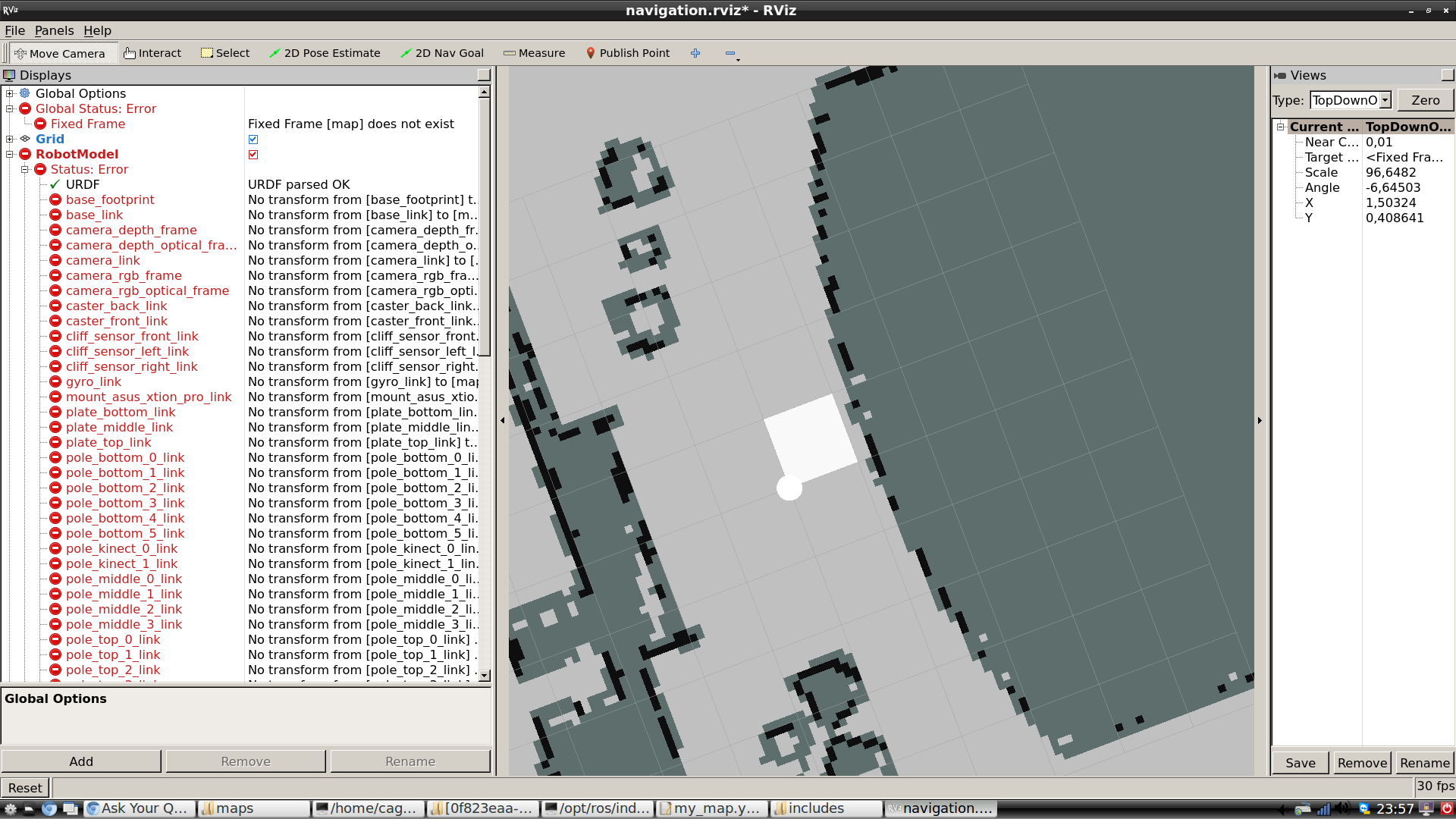
| 2015-11-21 20:36:58 -0500 | asked a question | Rviz: Fixed frame [Map] does not exist Hello, I am trying to do this tutorial Writing A Global Path Planner As Plugin in ROS and i finally managed to get to last step, to simulate on Gazebo. After using
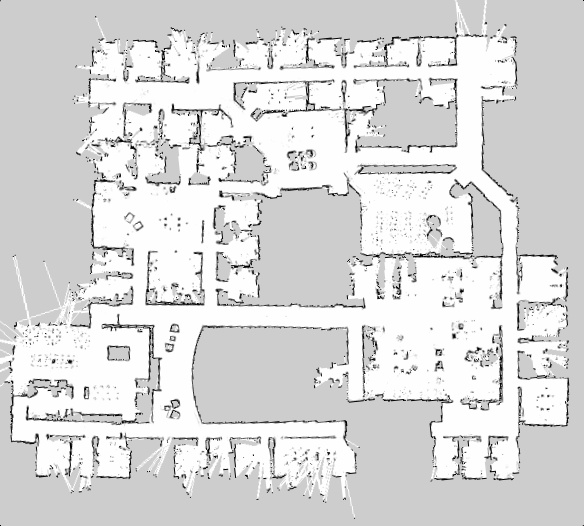
Any ideas? Thank you. Edit: My map files:
My launch file : |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
{kind=link}