The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2017-06-05 03:49:03 -0500 | received badge | ● Famous Question (source) |
| 2017-04-20 16:15:36 -0500 | received badge | ● Notable Question (source) |
| 2016-04-28 03:45:39 -0500 | received badge | ● Popular Question (source) |
| 2016-04-27 16:58:55 -0500 | commented answer | Local costmap parameters for tight spaces Thanks. That's helpful and will try resolution. Increasing cost_scaling_factor and decreasing occdist_scale has helped as well. |
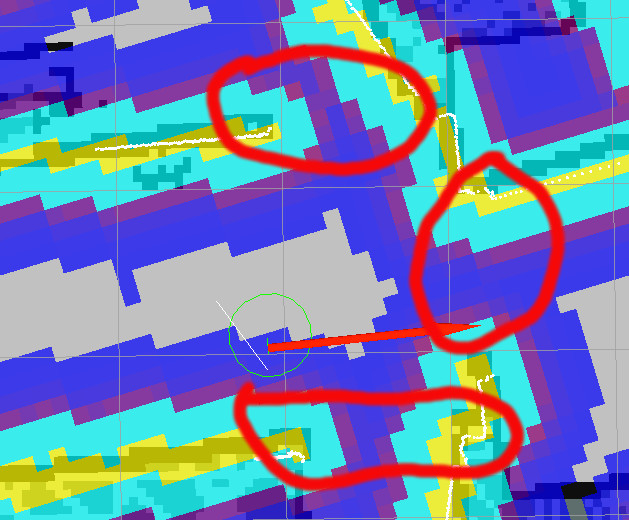
| 2016-04-25 14:36:56 -0500 | asked a question | Local costmap parameters for tight spaces I'm tuning our navigation stack for a smaller mobile platform in an office environment and we're having trouble adjusting the costmap so that the local planner can get through doors. Other than this issue we have a system that works well. Can anyone recommend parameters to investigate for tuning? We've looked at cost_scaling_factor, inflation_radius, and occdist_scale. I've uploaded a screenshot from rviz and circled three door openings. The global planner appears to plan the path ok, but the local planner gets to the door and will typically enter a recovery behavior and abort the goal.
|
| 2014-09-18 19:03:19 -0500 | answered a question | How to use multiple RGB cameras with ROS? I found gscam to be a pain with more than one camera. Best to go with one of the other webcam packages, and you can setup some udev rules to tie your devices to specific /dev addresses. I've used uvc_camera as well as usb_cam. |
| 2014-09-07 19:20:07 -0500 | received badge | ● Teacher (source) |
| 2014-09-07 11:57:00 -0500 | answered a question | How to write a motor controller driver? I recently wrote a python ROS node for Roboclaw that runs on Indigo. I'm cleaning it up for release but it didn't take too long to get a basic driver working with pyserial. My biggest issue has been read errors that sometimes need to trigger a reset of the port connection. You'll want to subscribe to a /cmd_vel topic with geometry_msgs/Twist message type to handle your linear and angular velocity commands, if that's suitable with your use case. I read encoder values and publish them on /odom for odometry. Service calls would make sense if you want to change change PID parameters, voltage cutouts, etc. |
| 2014-08-26 22:31:27 -0500 | commented question | Arduino publishing to Ubuntu through WIFI I haven't done this myself but you could try to modify rosserial_arduino such that it communicates via the WiFi library instead of the UART. rosserial_arduino and rosserial_embeddedlinux are both customized versions of rosserial_client: http://wiki.ros.org/rosserial |
| 2014-08-25 19:23:46 -0500 | received badge | ● Enthusiast |
| 2014-08-06 14:21:47 -0500 | received badge | ● Supporter (source) |
| 2014-08-06 12:03:59 -0500 | commented question | Help in using serial library on Ubuntu for communication with ROS You could continue debugging that package and make sure it's publishing to the ROS topic with dummy values. If that's working then you know it's a serial read issue. |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.