
Local costmap parameters for tight spaces

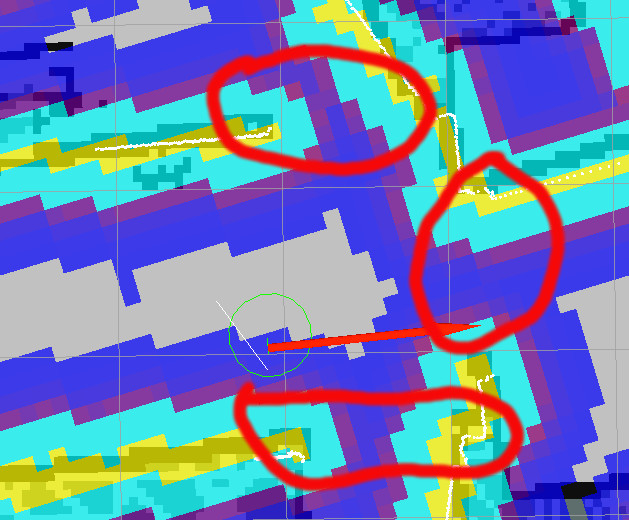
I'm tuning our navigation stack for a smaller mobile platform in an office environment and we're having trouble adjusting the costmap so that the local planner can get through doors. Other than this issue we have a system that works well. Can anyone recommend parameters to investigate for tuning? We've looked at cost_scaling_factor, inflation_radius, and occdist_scale. I've uploaded a screenshot from rviz and circled three door openings. The global planner appears to plan the path ok, but the local planner gets to the door and will typically enter a recovery behavior and abort the goal.
add a comment

