The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2017-06-30 09:05:01 -0500 | received badge | ● Favorite Question (source) |
| 2017-06-30 08:39:22 -0500 | received badge | ● Good Question (source) |
| 2016-07-18 01:05:22 -0500 | received badge | ● Great Question (source) |
| 2015-03-09 21:21:50 -0500 | received badge | ● Nice Question (source) |
| 2014-08-21 02:43:11 -0500 | received badge | ● Famous Question (source) |
| 2014-07-09 06:55:51 -0500 | commented question | Modify position in hector_mapping code? I edited my question to show the 2 maps. |
| 2014-07-09 06:54:26 -0500 | received badge | ● Editor (source) |
| 2014-07-09 06:39:12 -0500 | commented question | Modify position in hector_mapping code? Yes I did. I am running 2 hector_mapping nodes, one for the tf, one for the map. I haven't added odometry yet, so I expected the map to be the same as if there were only one node running but that's not the case. The 2 maps are globally very similar but the new map seems to be more noisy. |
| 2014-07-09 04:47:58 -0500 | received badge | ● Notable Question (source) |
| 2014-07-09 02:29:56 -0500 | commented answer | Modify position in hector_mapping code? Then I could potentially use for example the laser_scan_matcher node to provide the tf or even run two hector_mapping nodes at the same time. One would provide the tf and another just the mapping. In between these 2 nodes I could make my own node to modify the transform according to odometry. |
| 2014-07-09 02:26:50 -0500 | commented answer | Modify position in hector_mapping code? Thank you for the answer. So if I understand correctly, if I set both of these parameters to true and provide hector_mapping with the map->odom tf or map->base_link tf then the map would be created according to the position given by the tf? |
| 2014-07-08 20:32:44 -0500 | received badge | ● Popular Question (source) |
| 2014-07-08 20:31:30 -0500 | commented answer | Modify position in hector_mapping code? Thanks dornhege for the quick answer. What do you mean by "multiply that on the startEstimate to get a new startEstimate"? I can not multiply two 3 line (x,y,theta) vectors together. |
| 2014-07-08 02:11:17 -0500 | asked a question | Modify position in hector_mapping code? Hi guys, As the question suggests I am trying to modify the HectorMappingRos.cpp/.h from the hector_mapping package and in particular the position used by the mapping function. My problem is that when my robot goes through long featureless hallways, hector_mapping does not detect a change in position. So what I'm trying to achieve is using odometry from another sensor when this problem happens. It would be a simple switch: when hector_mapping is saying that the robot isn't moving but the odometry says that it is, then take the position from the odometry data. I have been going through the code and my guess is that I have to modify line 289 of HectorMappingRos.cpp: "startEstimate = slamProcessor->getLastScanMatchPose();". startEstimate is a vector with the (x,y) coordinates and the yaw angle. My first attempt was to replace the yaw angle with the angle given by an IMU, but this resulted in very bad mapping. Some features were duplicated with a certain angle offset and one hallway was bent. Has anyone got an opinion on the matter? EDIT 1: I have tried setting the undocumented (as in you won't find it on the official ros hector_mapping page but it is there in the code) "use_map_with_known_poses" to "true". The result is that hector_mapping no longer computes the pose of the robot, so the position remains the initial position overtime and every time the map is updated, the new map is simply put on top of the previous one because the position hasn't changed.
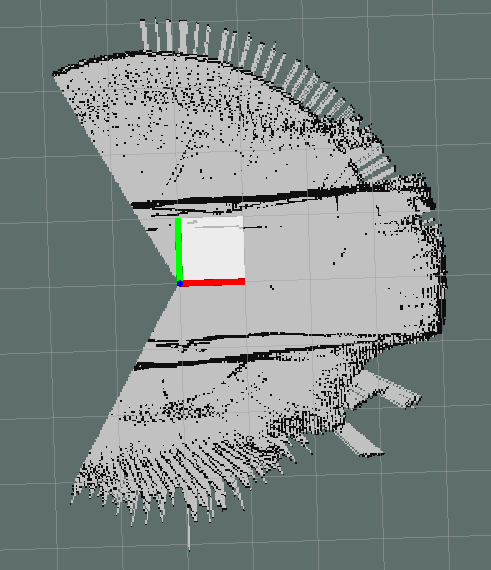
I can't seem to be able to "feed" a position topic to hector_mapping. I do not think that it is presently supported by hector_mapping as I do not see any declaration of a subscriber to a position topic in the code. EDIT 2: As suggested I set both "map_with_known_poses" and "use_tf_pose_start_estimate" to true. Then I use a first hector_mapping node to publish the map->odom transform that is then being used by a second hector_mapping node for the mapping. Note that it is only for the 2nd node that the 2 parameters mentioned before should be set to true. Here is the map out of the first node:
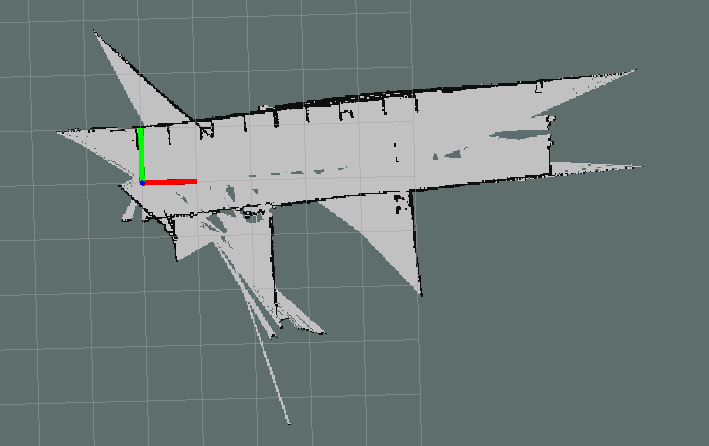
And here is the map from the 2nd:
Would anyone know why the 2 maps are not identical? |
| 2014-07-07 01:34:08 -0500 | commented answer | Odometry with optical mouse? 2nd link actually |
| 2014-07-06 22:01:42 -0500 | commented answer | Odometry with optical mouse? Thanks ccapriotti for the explanation, you kept it nice and simple, I got it now. I strongly recommend the link to the first paper that Stefan Kohlbrecher gave, great practical solutions. |
| 2014-07-06 22:01:42 -0500 | received badge | ● Commentator |
| 2014-07-04 20:29:42 -0500 | commented answer | Odometry with optical mouse? Thanks for the the link, I will definitely look into that. Although I am focusing more on solutions including 'hacking' by connecting to the output of the sensor. It seems to be the way to go as I am probably going to buy off the shelves sensors in the future (as opposed to buying an actual mouse). |
| 2014-07-04 20:15:07 -0500 | commented answer | Odometry with optical mouse? I mean except for the position from the back sensor and the rotation direction of the wheel from the other sensor |
| 2014-07-04 19:53:49 -0500 | commented answer | Odometry with optical mouse? Thanks for the sketch ccapriotti. So if the sensor on the wheel tells you that the wheel is rotating but the one at the back tells you that the robot isn't moving then you can tell that you're robot is skidding. Is that about right or can you actually get more out of your sensors? |
| 2014-07-03 15:56:23 -0500 | received badge | ● Famous Question (source) |
| 2014-07-03 15:48:57 -0500 | received badge | ● Good Question (source) |
| 2014-07-03 02:11:04 -0500 | commented answer | Odometry with optical mouse? I am actually using the rosserial_arduino package with an arduino Uno to read the data out of the sensor. Seems to works well enough, though I haven't put it on an actual robot yet. |
| 2014-07-03 02:07:55 -0500 | commented answer | Odometry with optical mouse? Thanks for the ideas Mehdi. My first approach was to get the real world coordinates of the mouse from the position of the cursor on the screen. But you can not use this method if you are ever to use more than one of these sensors, or at least I do not see how you could make it work. |
| 2014-07-03 01:50:20 -0500 | commented question | Odometry with optical mouse? I am definitely interested in any idea that may help the odometry work better, although I do not see where you want to put the second sensor. Could you maybe draw a quick sketch or just elaborate a bit might be enough for me to understand? |
| 2014-07-02 21:33:22 -0500 | received badge | ● Nice Question (source) |
| 2014-07-02 21:33:12 -0500 | received badge | ● Notable Question (source) |
| 2014-07-02 03:31:37 -0500 | received badge | ● Enthusiast |
| 2014-07-01 19:59:34 -0500 | commented question | Odometry with optical mouse? can't really take any credit for that, many people have already successfully done what I'm trying to do :), just wondering if anyone has done with ROS |
| 2014-07-01 16:57:36 -0500 | received badge | ● Popular Question (source) |
| 2014-07-01 12:30:45 -0500 | received badge | ● Student (source) |
| 2014-07-01 07:47:37 -0500 | asked a question | Odometry with optical mouse? Hi guys, I am currently looking at using odometry with the position given by an optical mouse. As I couldn't find any package/node driver that would allow me to have access to the position of the mouse, I was wondering if anyone had already looked into that and could give some feedback. Thanks in advance for the replies |
| 2014-06-12 21:47:59 -0500 | commented question | imu_node calibration check failed Thanks for your answer. I too am using the imu data as it is for now, I'll post a solution here if I ever find one. |
| 2014-06-10 20:27:35 -0500 | commented question | imu_node calibration check failed Hi there mark_vision, I am also using a Microstrain IMU with the imu_node and I am having the same problem. Did you find a way to solve the "failed calibration" error? Thanks in advance, Antoine |
| 2014-06-10 20:27:02 -0500 | answered a question | imu_node calibration check failed Hi there mark_vision, I am also using a Microstrain IMU with the imu_node and I am having the same problem. Did you find a way to solve the "failed calibration" error? Thanks in advance, Antoine |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.