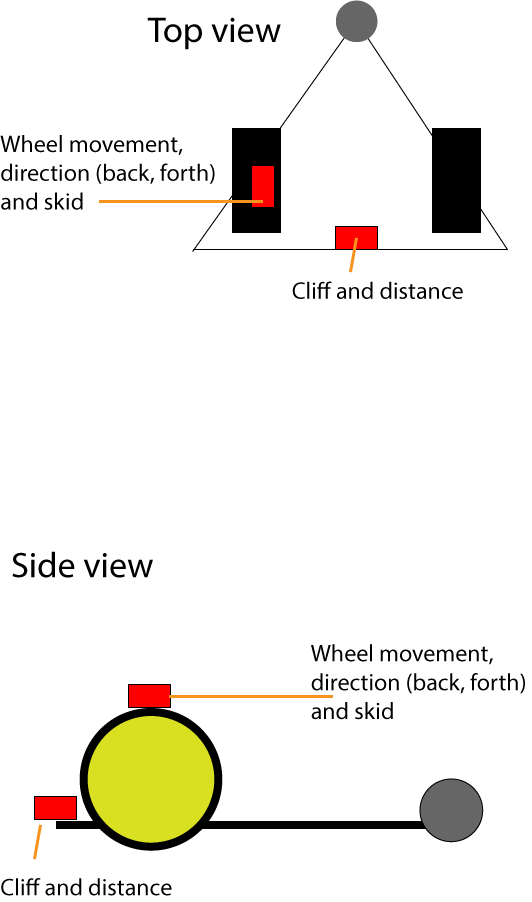
Just adding the sketch as requested:
@Mehidi: Your description is right. Indeed, that was what I meant.
One comment: if the sensor on the base is too far from the floor, it may not work, or you will need lenses to focus/compensate the distance.
This also reduces the hight of your base and the possibility of going over obstacles.
But it is cheap, and tends to be precise: optical mouses can work with resolution of typically 300 dpi.
Quick explanation of sketch: gray wheel: free wheel. Black wheel (yellow core) drive wheels. "Robot" is mounted on a triangular base.
Ok, so let's think about the possibilities on what kind of data you can gather from this.
The concept is simple physics: distance over time.
- If the wheel sensor reads
movement, you can actually calculate
the linear speed of the wheel.
2) If the linear speed of the wheel and
the linear speed detected by the
base sensor are the same, you robot
is moving.
3) If the linear speed of
the wheel is greater than the linear
speed of the "floor", your drive
wheel is skidding.
4) If the linear
speed of the floor is greater than
the linear speed of the wheel, your
robot is being dragged or going down
a very slippery path.
5) if the
base sensor detects movement in the
X and Y axes, your robot is either
making a curve, or spinning. You can
calculate angular speed of the
curve, if you think you need it.
6) If you detect that the wheel speed
is fluctuating, your robot may be on
some sort of low cohesion soil, like
pebbles.





Very good approach ! Thinking outside the box at its best !
can't really take any credit for that, many people have already successfully done what I'm trying to do :), just wondering if anyone has done with ROS
Since we are thinking outside of the box here, you could use two mouse-based sensors: one on the robot, close to the floor, and another on your wheel's surface (mechanics permitting) , so you could measure skidding, implement cliff-avoidance, and some other good stuff.
I am definitely interested in any idea that may help the odometry work better, although I do not see where you want to put the second sensor. Could you maybe draw a quick sketch or just elaborate a bit might be enough for me to understand?
I think he means to fix the second mouse above one of the wheels, with very small distance between the mouse's sensor and the wheels surface (wheel has to be flat in this case)
Hi, did you finally happen to work on this type of Odom? any good resources?