The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-07-17 22:31:44 -0500 | received badge | ● Famous Question (source) |
| 2023-07-17 06:18:52 -0500 | commented answer | Waiting for joint_group_position_controller/follow_joint_trajectory to come up @quangg.07 Create controller manager in crX_moveit_controllers.yaml (CR_ROS > dobot_gazebo > config) then add new |
| 2023-07-05 05:25:44 -0500 | commented answer | Start state does not change according to current state Thank for your answer! This is a problem that I've given up and left for a very long time. Now you saved me, thank you v |
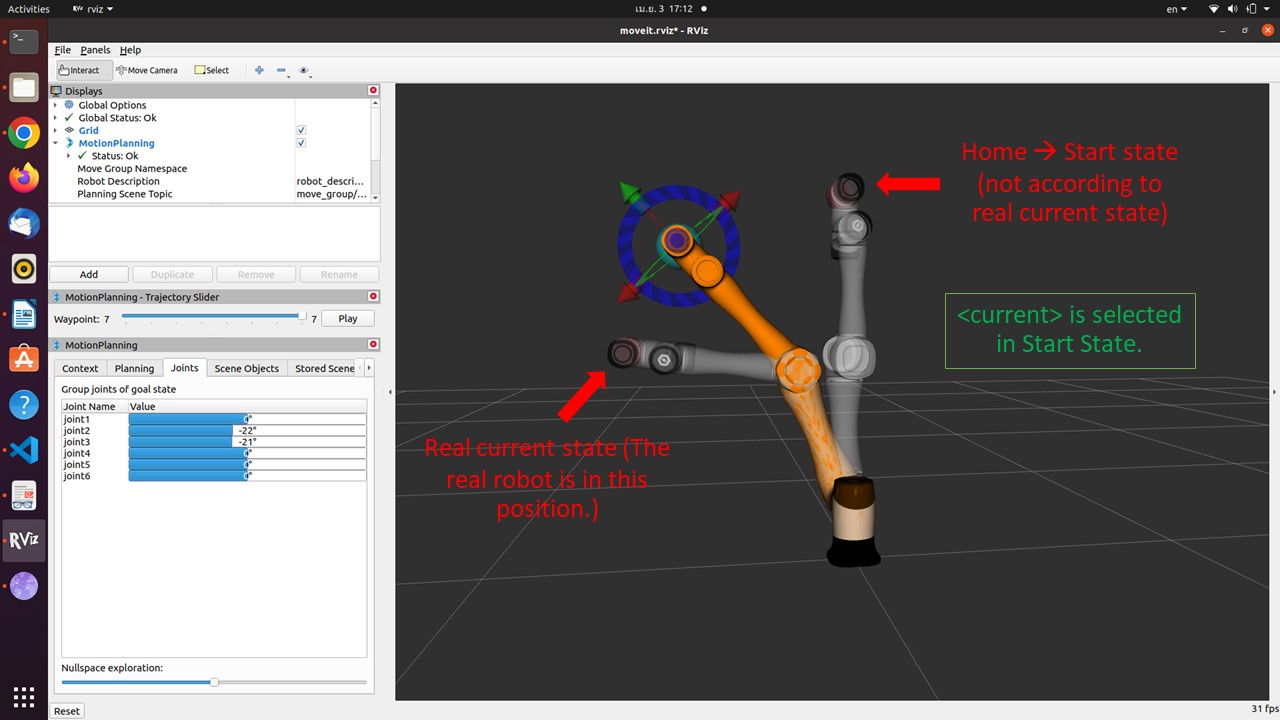
| 2023-07-05 05:24:05 -0500 | marked best answer | Start state does not change according to current state Hi, I'm having trouble controlling a real robot with this package. The robot can connect and move normally, but the problem is that the robot's start state does not change according to the current state. Of course I didn't forget to check and change the start state to current already.
From the picture, when I press plan, the real current status disappears immediately and will start showing movement to the position from the start state (Home pose) instead. As a result, every time the real robot moves (execute), the state on rviz is incorrect. When changing the trajectory, the real robot will go back to the Home pose first then change to the new position. This is a problem that I can't switch to other control with. I can't use JointPositionController instead of JointTrajectoryController , because it (joint state) still understands that I am still in Home position. I want to know what could be the cause. How should I check and where to fix it? Please help me. P.S. Thank you all. |
| 2023-07-05 05:24:05 -0500 | received badge | ● Scholar (source) |
| 2023-04-27 14:35:12 -0500 | received badge | ● Notable Question (source) |
| 2023-04-17 14:04:31 -0500 | commented question | TurtleBot2 on ROS2 Humble At sudo apt install ros-galactic-.......... you should try changing galactic to humble because you are using that versio |
| 2023-04-17 14:02:15 -0500 | commented question | TurtleBot2 on ROS2 Humble At sudo apt install ros-galactic-.......... you should try changing galactic to humble because you are using that versio |
| 2023-04-17 14:01:44 -0500 | commented question | TurtleBot2 on ROS2 Humble At sudo apt install ros-galactic-.......... you should try changing galactic to humble because you are using that versio |
| 2023-04-17 14:01:44 -0500 | received badge | ● Commentator |
| 2023-04-17 13:19:26 -0500 | asked a question | joint_states issue in CR_ROS package joint_states issue in CR_ROS package Hello everyone, has anyone ever used or is currently using CR_ROS? It's a package f |
| 2023-04-12 11:33:36 -0500 | received badge | ● Notable Question (source) |
| 2023-04-12 11:33:36 -0500 | received badge | ● Famous Question (source) |
| 2023-04-10 15:16:29 -0500 | commented question | MoveIt! MotionPlanning plugin does not update the start state I ran into a similar problem with other robot. Do you know how to solve it? |
| 2023-04-10 15:10:34 -0500 | received badge | ● Popular Question (source) |
| 2023-04-07 09:30:57 -0500 | answered a question | Start state does not change according to current state I have solved the initial problem even though the home state on rviz is still there but the real robot can move point-to |
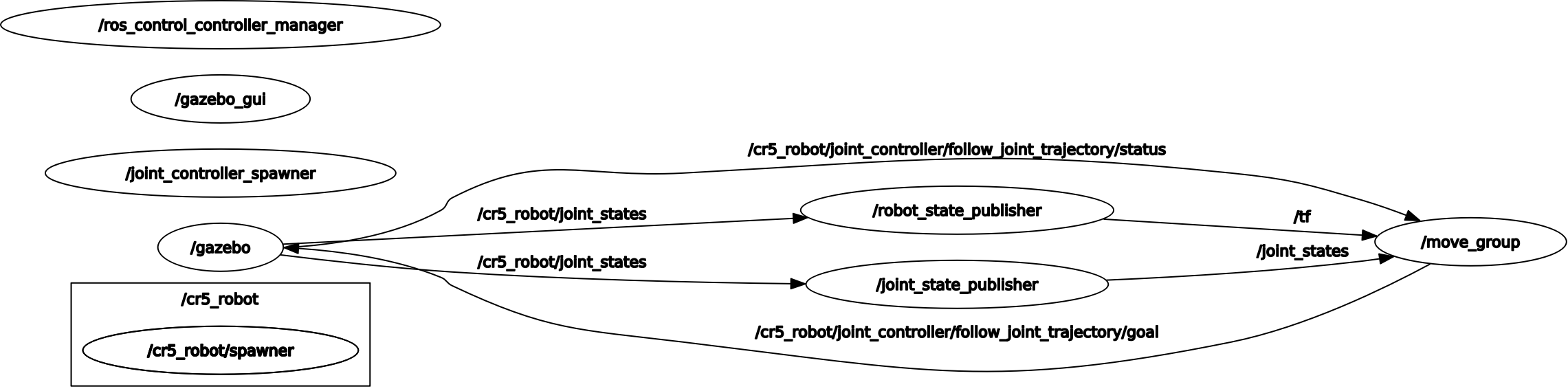
| 2023-04-07 02:39:16 -0500 | marked best answer | Waiting for joint_group_position_controller/follow_joint_trajectory to come up Hi, I am using dobot cr5 with this package and want to control in realtime arm servoing tutorial, but found the following problem The commands I use are as follows I've solved this problem and this, which in gazebo.launch I add in cr5_moveit_controllers.yaml I have modified controller list as below, I try to add joint_group_position_controller to it. (I've tried building without cr5_robot but it didn't work.) and in moveit_planning_excution.launch have added I used to change the remap to cr5_robot/joint_group_position_controller/follow_joint_trajectory didn't work either. The result of all the fixes is that cr5_robot/joint_controller can be used normally but I still get stuck Waiting for cr5_robot/joint_group_position_controller/follow_joint_trajectory to come up and have rqt_graph as picture.
which added ros_control_controller_manager according to the tutorial, it shouldn't be extracted like this. Anyway, this fix I've done on the Kuka KR16 and it worked but it didn't work this time. P.S. If I change the type from position_controllers/JointGroupPositionController to position_controllers/JointTrajectoryController, it can be summoned successfully, but it won't be right. |
| 2023-04-07 02:38:07 -0500 | received badge | ● Popular Question (source) |
| 2023-04-03 07:23:34 -0500 | answered a question | Waiting for joint_group_position_controller/follow_joint_trajectory to come up For anyone who is stuck with the same problem as me. The solution is that you have to create ros_control_controller_mana |
| 2023-04-03 07:19:15 -0500 | asked a question | Start state does not change according to current state Start state does not change according to current state Hi, I'm having trouble controlling a real robot with this package |
| 2023-03-31 12:29:14 -0500 | edited question | Waiting for joint_group_position_controller/follow_joint_trajectory to come up Waiting for joint_group_position_controller/follow_joint_trajectory to come up Hi, I am using dobot cr5 with this packag |
| 2023-03-31 12:26:35 -0500 | edited question | Waiting for joint_group_position_controller/follow_joint_trajectory to come up Waiting for joint_group_position_controller/follow_trajectory to come up Hi, I am using dobot cr5 with this package and |
| 2023-03-31 12:25:49 -0500 | edited question | Waiting for joint_group_position_controller/follow_joint_trajectory to come up Waiting for <controller name=""> to come up of dobot cr5 Hi, I am using dobot cr5 with this package and want to co |
| 2023-03-30 22:50:53 -0500 | edited question | Waiting for joint_group_position_controller/follow_joint_trajectory to come up Waiting for <controller name=""> to come up of dobot cr5 Hi, I am using dobot cr5 with this package and want to co |
| 2023-03-30 04:30:44 -0500 | edited question | Waiting for joint_group_position_controller/follow_joint_trajectory to come up Waiting for <controller name=""> to come up of dobot cr5 Hi, I am using dobot cr5 with this package and want to co |
| 2023-03-30 04:30:44 -0500 | received badge | ● Editor (source) |
| 2023-03-29 23:01:43 -0500 | received badge | ● Famous Question (source) |
| 2023-03-29 23:01:43 -0500 | received badge | ● Notable Question (source) |
| 2023-03-29 23:01:42 -0500 | received badge | ● Famous Question (source) |
| 2023-03-29 23:01:42 -0500 | received badge | ● Notable Question (source) |
| 2023-03-29 23:01:39 -0500 | received badge | ● Popular Question (source) |
| 2023-03-29 23:01:38 -0500 | received badge | ● Famous Question (source) |
| 2023-03-29 23:01:38 -0500 | received badge | ● Notable Question (source) |
| 2023-03-29 22:55:32 -0500 | asked a question | Waiting for joint_group_position_controller/follow_joint_trajectory to come up Waiting for <controller name=""> to come up of dobot cr5 Hi, I am using dobot cr5 with this package and want to co |
| 2022-08-26 16:12:01 -0500 | received badge | ● Notable Question (source) |
| 2022-08-16 23:16:43 -0500 | commented question | How to write a robot that moves point to point? @Ravi Joshi OK, I will try it. Thank you for your advice. |
| 2022-08-16 21:11:15 -0500 | received badge | ● Popular Question (source) |
| 2022-08-16 10:48:01 -0500 | commented answer | How to write a robot that moves point to point? Thanks!, I'll try to read it. |
| 2022-08-16 10:16:59 -0500 | asked a question | How to write a robot that moves point to point? How to write a robot that moves point to point? Hello everyone I would like some advice on how to write the robot to lo |
| 2022-07-13 14:10:21 -0500 | asked a question | How to edit plant_sim in pid controller of ros? How to edit plant_sim in pid controller of ros? Hello everyone I'm having trouble using ros pid, which I'm using for th |
| 2022-07-07 11:42:18 -0500 | received badge | ● Popular Question (source) |
| 2022-06-30 05:43:29 -0500 | commented question | Kuka kr16 and dynamics? @gvdhoorn Thanks for your answer. And yes it's not about ros, I'm sorry I asked in this community. Your answer gave me a |
| 2022-06-29 23:31:45 -0500 | commented question | Kuka kr16 and dynamics? Have fun until tears flow, right? hahaha, thanks for the answer. I'm currently using the F/T Sensor: mini40 to control t |
| 2022-06-29 11:48:06 -0500 | commented answer | Kuka kr16 and dynamics? Thank you very much for your answer. To be honest, there are many more in the package that I haven't studied and underst |
| 2022-06-29 11:04:43 -0500 | asked a question | Kuka kr16 and dynamics? Kuka kr16 and dynamics? Hello everyone This thread is open to asking short questions to find answers. I am a student w |
| 2022-06-21 12:56:10 -0500 | commented question | moveit_servo won't move arm in gazebo, only oscillates Hello, I'm a newbie who is learning to use realtime arm servoing too. I'm going to use it with the 6-DOF robot, but as I |
| 2022-06-21 12:21:12 -0500 | received badge | ● Popular Question (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.