
Waiting for joint_group_position_controller/follow_joint_trajectory to come up
Hi, I am using dobot cr5 with this package and want to control in realtime arm servoing tutorial, but found the following problem
[ INFO] [1680115539.325299331, 24.522000000]: Added FollowJointTrajectory controller for cr5_robot/joint_controller
[ WARN] [1680115544.378328009, 29.534000000]: Waiting for cr5_robot/joint_group_position_controller/follow_joint_trajectory to come up
[ WARN] [1680115550.434961614, 35.535000000]: Waiting for cr5_robot/joint_group_position_controller/follow_joint_trajectory to come up
[ERROR] [1680115556.490301391, 41.536000000]: Action client not connected: cr5_robot/joint_group_position_controller/follow_joint_trajectory
The commands I use are as follows
gazebo.launch
moveit_planning_execution.launch sim:=True
moveit_rviz.launch config:=True
I've solved this problem and this, which in gazebo.launch I add
<rosparam file="$(find dobot_gazebo)/config/cr5_moveit_controllers.yaml" command="load"/>
<node name="joint_controller_spawner" pkg="controller_manager" type="controller_manager" args="spawn cr5_robot/joint_controller" respawn="false" output="screen"/>
<node name="ros_control_controller_manager" pkg="controller_manager" type="controller_manager" respawn="false" output="screen" args="load cr5_robot/joint_group_position_controller" />
in cr5_moveit_controllers.yaml I have modified controller list as below, I try to add joint_group_position_controller to it. (I've tried building without cr5_robot but it didn't work.)
cr5_robot:
joint_state_controller:
type: joint_state_controller/JointStateController
publish_rate: 50
joint_controller:
type: position_controllers/JointTrajectoryController
joints:
- joint1
- joint2
- joint3
- joint4
- joint5
- joint6
constraints:
goal_time: 0.6
stopped_velocity_tolerance: 0.05
joint1: {trajectory: 0.1, goal: 0.1}
joint2: {trajectory: 0.1, goal: 0.1}
joint3: {trajectory: 0.1, goal: 0.1}
joint4: {trajectory: 0.1, goal: 0.1}
joint5: {trajectory: 0.1, goal: 0.1}
joint6: {trajectory: 0.1, goal: 0.1}
stop_trajectory_duration: 0.5
state_publish_rate: 25
action_monitor_rate: 10
joint_group_position_controller:
type: position_controllers/JointGroupPositionController
joints:
- joint1
- joint2
- joint3
- joint4
- joint5
- joint6
and in moveit_planning_excution.launch have added
<remap if="$(arg sim)" from="/follow_joint_trajectory" to="/cr5_robot/joint_controller/follow_joint_trajectory"/>
I used to change the remap to cr5_robot/joint_group_position_controller/follow_joint_trajectory didn't work either. The result of all the fixes is that cr5_robot/joint_controller can be used normally but I still get stuck Waiting for cr5_robot/joint_group_position_controller/follow_joint_trajectory to come up and have rqt_graph as picture.
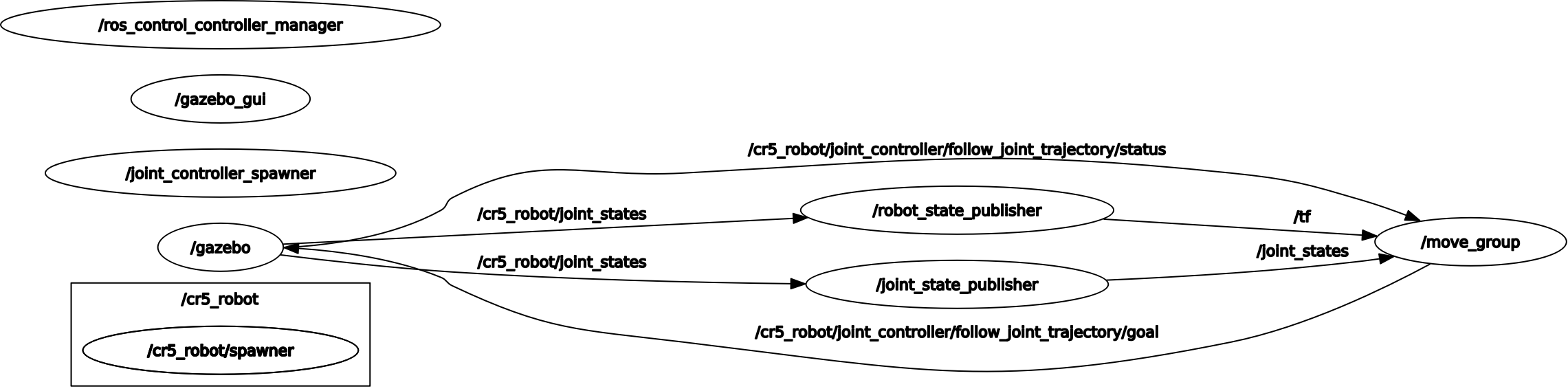
which added ros_control_controller_manager according to the tutorial, it shouldn't be extracted like this. Anyway, this fix I've done on the Kuka KR16 and it worked but it didn't work this time.
P.S. If I change the type from position_controllers/JointGroupPositionController to position_controllers/JointTrajectoryController, it can be summoned successfully, but it won't be right.
