
SimpleActionClient callback for pre-empted goals
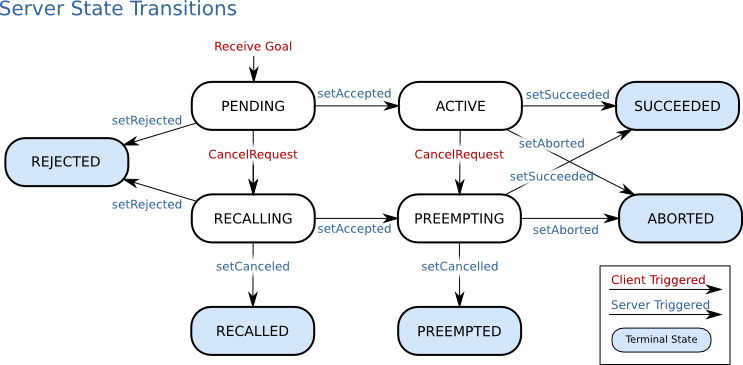
Given a simple action client and server pair, working in callback mode, I dont think it's possible to get the client to be aware of when goals are pre-empted. It would seem a fairly 'simple' thing to want to be aware of. Goals when they're preempted in the server, trigger the server's callback, but once you're inside that callback nothing can get through to the action client's callbacks (not setSucceeded, setFeedback or setCanceled). Nothing turns up at the client's end I think because it is triggering on transitions, and it isn't set up for these particular transitions.
Or is there a way to do this that I've missed? Right now I'm looking at having to set up a specific subscriber to the action server's result topic, which works around the client/server mechanisms. Either that or go the full action server. A bit overkill for what I'm trying.
I wrote a simplified package to demonstrate. To compile, download the tarball, or just to view the source:
Is there something awry in the server handling?


I know this was a long time ago, but any chance you could repost your code? I think it'll be very helpful for something I'm trying to put together. Thanks!