
How to compile opencv with camera
Hello, I try to compile my old projection with opencv. And about connecting camera, I try run code, and to run this node, I should open the camera stream. so I try rosrun usb_cam, which open the Logitech Quick-cam. But I have no idea about how to get this camera stream to link the my own node.
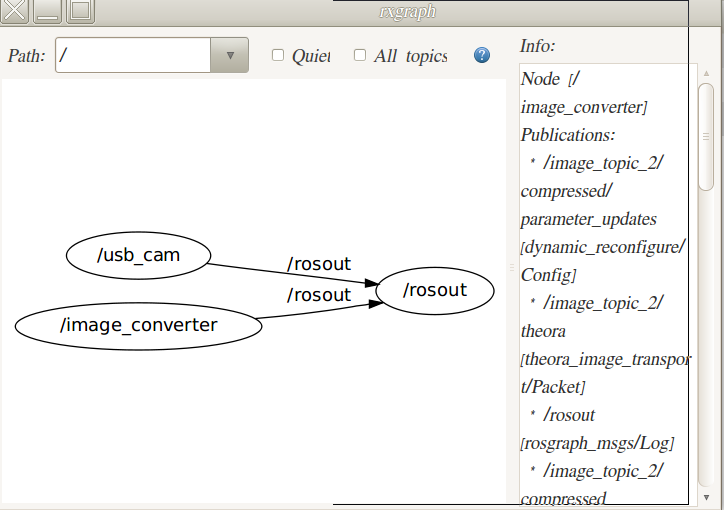
and this is my rxgraph: C:\fakepath\Screenshot.png
and also my rostopic list as belows:
/image_topic /image_topic_2 /image_topic_2/compressed /image_topic_2/compressed/parameter_descriptions /image_topic_2/compressed/parameter_updates /image_topic_2/theora /image_topic_2/theora/parameter_descriptions /image_topic_2/theora/parameter_updates /rosout /rosout_agg /usb_cam/camera_info /usb_cam/image_raw /usb_cam/image_raw/compressed /usb_cam/image_raw/compressed/parameter_descriptions /usb_cam/image_raw/compressed/parameter_updates /usb_cam/image_raw/theora /usb_cam/image_raw/theora/parameter_descriptions /usb_cam/image_raw/theora/parameter_updates
Any one can help me? and I aim to build my own opecv-projection on ROS system.
Best wishes!

{kind=link}