
Sync problem related to viso2.

Hi All. I'm trying to setup and run Viso2 node in ros fuerte. I have a problem related to a sync warning in gscam, so I asked this question:_http://answers.ros.org/question/84611/synchronized-problem-related-to-calibration/_
When I updated the code version of GSCAM, I could see the rectify image when I used the image_view node.
But my problem now is when I tried to Subscribed that topic (Image_rect) to Viso2 node, It show again the sync msg (warning message), this following message:
image_transport] Topics '/Dava/image_rect_color' and '/Dava/camera_info' do not appear to be synchronized. In the last 10s:
Image messages received: 100
CameraInfo messages received: 0
Synchronized pairs: 0
And when I used the command "rostop echo /mono_odometer/info" I don't see anything.
So I don't know if the problem is with my viso2 configuration or is a problem with GSCAM.
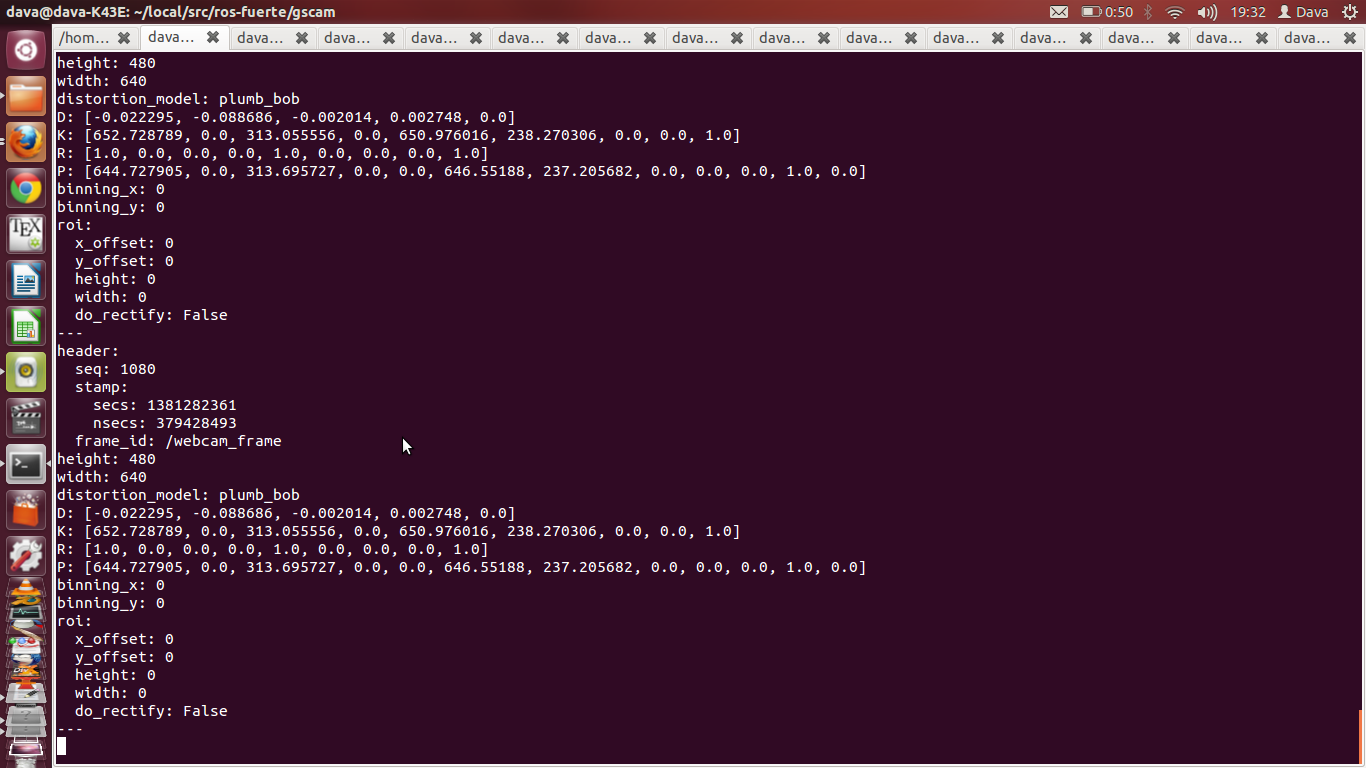
I attached the output, my camera calibration info (From rostopic echo) and rxgraph output. And you can download my lauch file in this link (): _https://mega.co.nz/#!W9pkkD5Q!NcRUbm0drgoKXXoli6rHDGUKEHBebpktfsO4Wd2tDas_
I will appreciate any respond . Thank


{kind=link}
{kind=link}
{kind=link}