
Having a problem with libgazebo_ros_control.so [closed]
Firs let me ask if this is the right forum or is this better placed in gazebosim forum. I have a post there on this also.
I believe this is the plugin that should be processing rostopic pub commands for joints as described in:
http://answers.ros.org/upfiles/1376684406385492.png
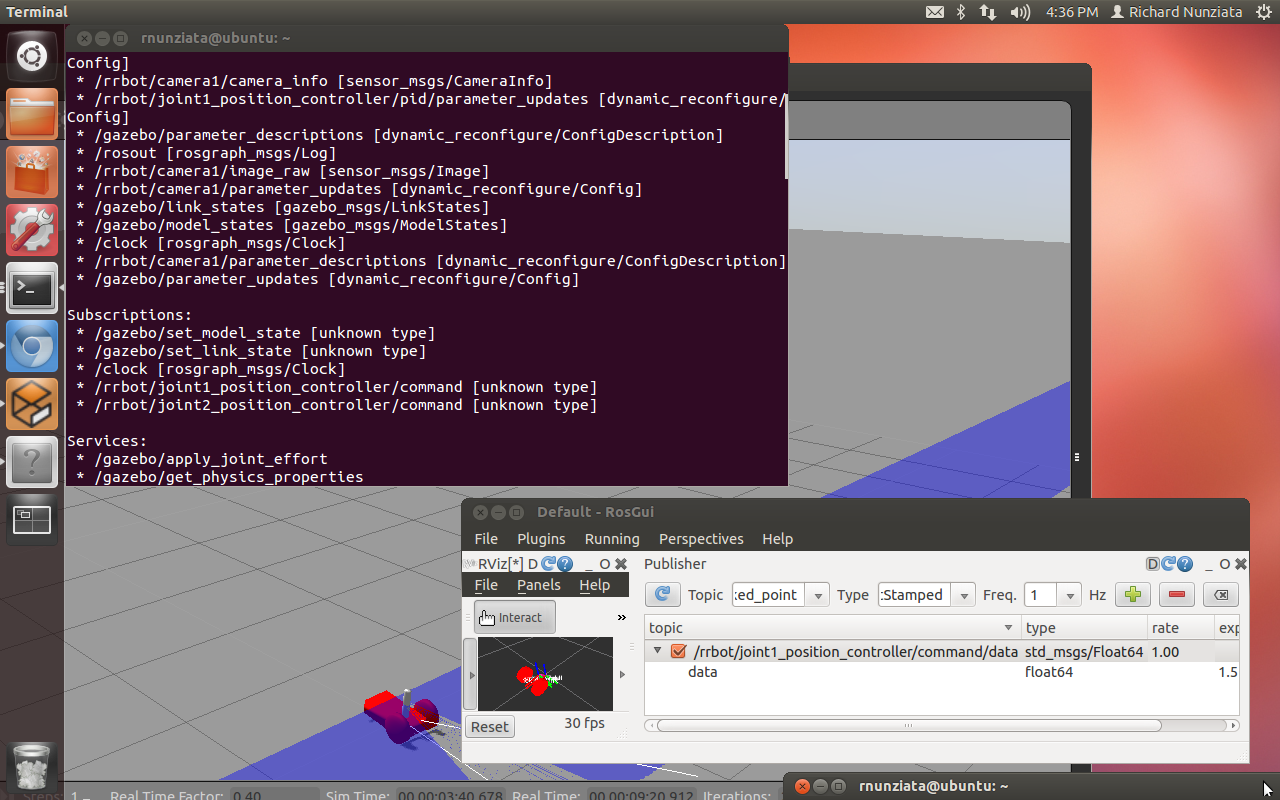
Update: Originally I was having an issue with the pid setting as in the tutorial pid: {p: 100.0, i: 0.01, d: 10.0} The model would launch itself into the air at some infinite distance. So I changed them to zeros and this kept the model in place in gazebo when I brought up the controllers. On a long shot I changed the pid setting and found that the setting below also worked and kept the model in place when the controllers can up.
pid: {p: 0.001, i: 0.001, d: 0.001} NOW however when I issue the line command ....everything works and joint moves. But why does my model jump off the grid with the setting in the tutorial? And a pid (000) stops the joint command msg from working but still allows the setForce in the joint tab to work.


{kind=link}
Please provide specific error messages not paraphrases. www.ros.org/wiki/Support