
openni depth image problem

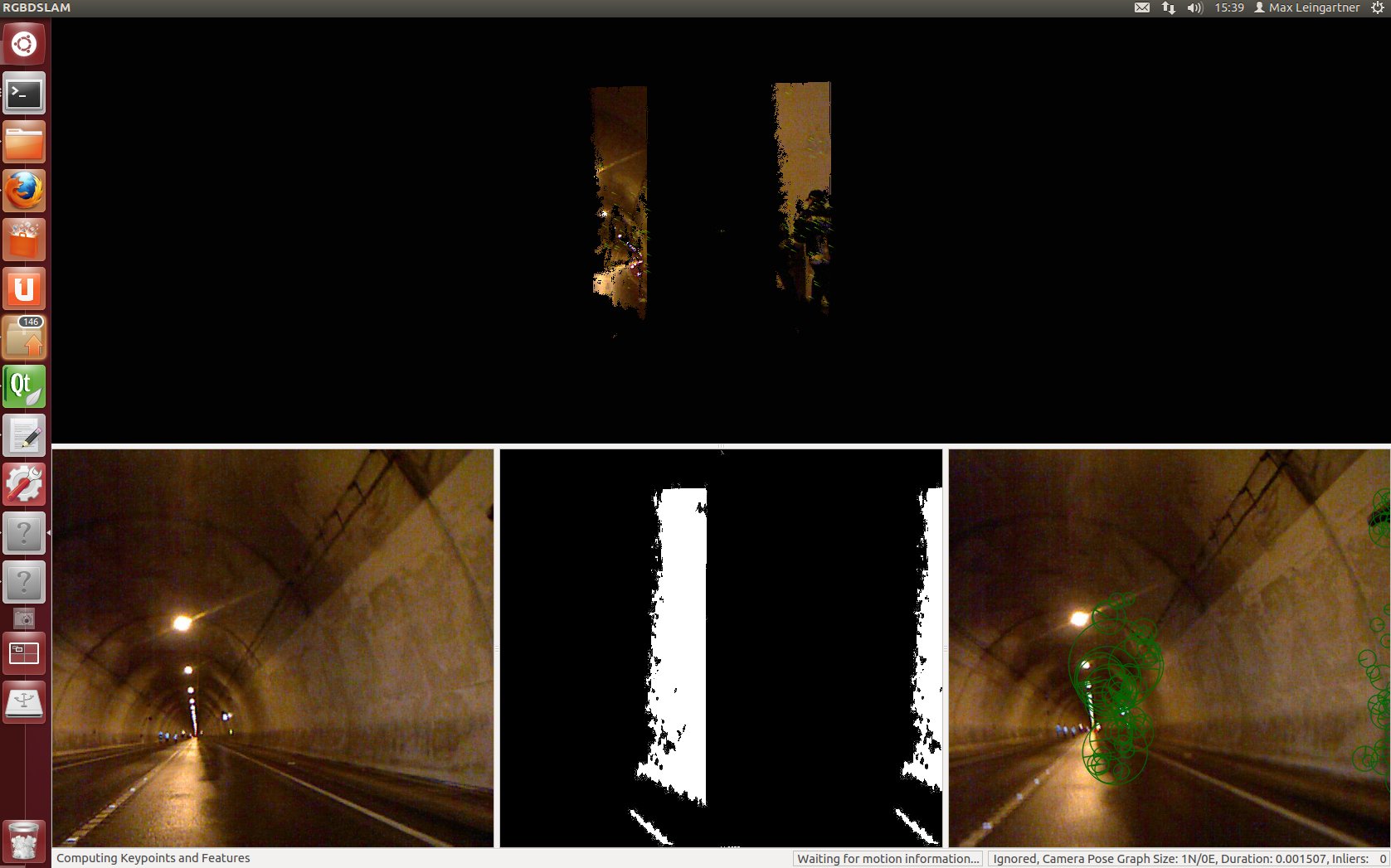
Can someone tell me why my depth image looks like that? I decompress my images of a bag like that:
<node name="DEPTH_decompressed" type="republish" pkg="image_transport" output="screen" args="compressed in:=/openni/depth_registered/image_raw raw out:=/openni/depth_registered/image_raw" required="true" />When I look at the thumbnails in rosbag, the image looks fine but when I use rviz or RGBD_SLAM, the image looks like 2 depth images side by side...
My system: Ubuntu 12.04 64Bit - ROS Fuerte
add a comment

