
MoveIt! Rviz Plugin - No interactive markers visible/available
Hello to all,
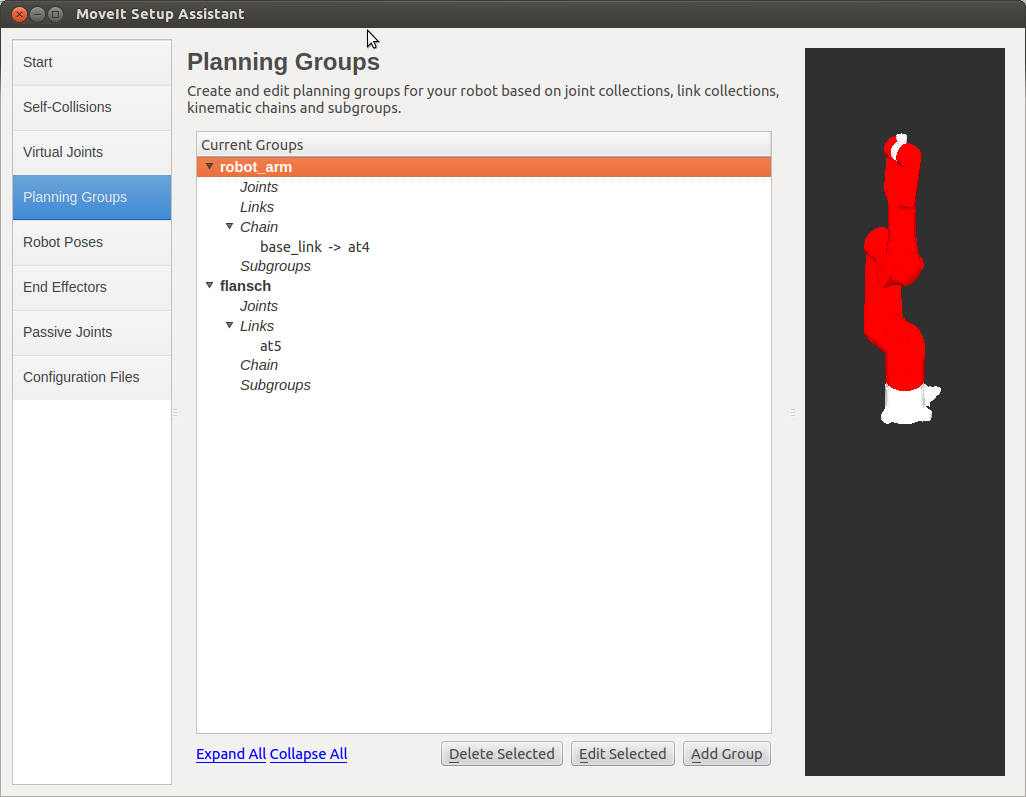
I created a Robot-Config via MoveIt! Setup Assistant. The Robot is a simple 6 Dof Robot.
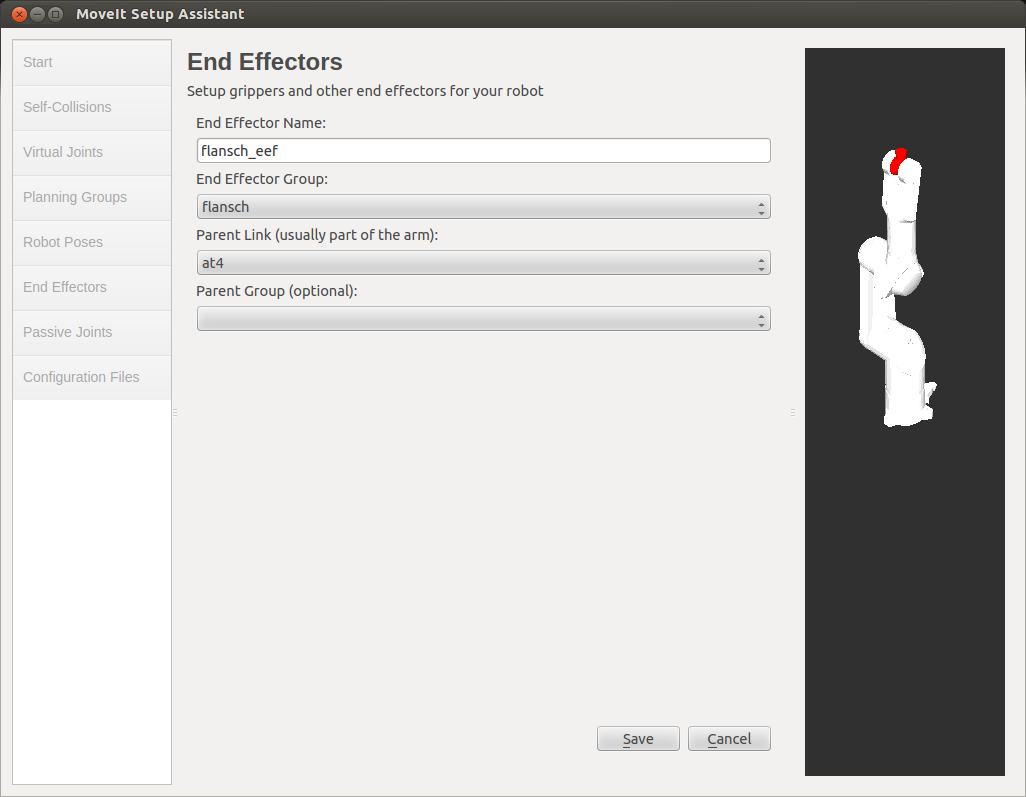
When I start it with the Rviz Moveit Plugin the interactive markers are not displayed. (After I click on "Interact"). I suspect the End-Effector is not correctly set by me.
RVIZ:
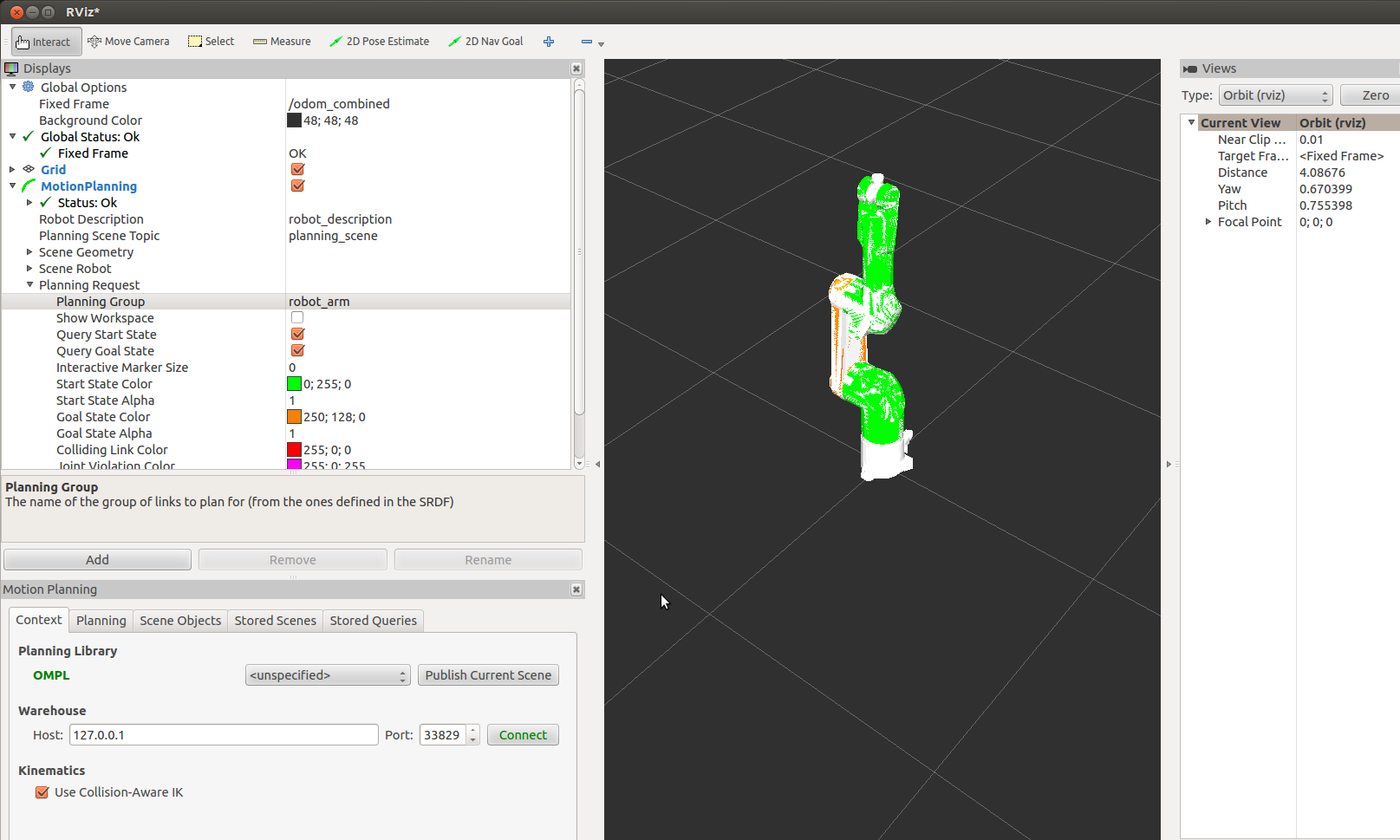
Screenshots of the MoveIt Setup Assistant:
1. 
2. 
I set for both plannings groups the "KDLKinematicsPlugin" as Solver on default values. I followed this tutorial for the pr2-robot.
My .launch-file:
<launch>
<include file="$(find tx60l_final3)/launch/upload_tx60l.launch"/>
<node pkg="tf" type="static_transform_publisher" name="odom_broadcaster" args="0 0 0 0 0 0 odom_combined base_footprint 100" />
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher">
<param name="/use_gui" value="false"/>
</node>
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" respawn="true" output="screen"/>
<include file="$(find tx60l_final3)/launch/move_group.launch">
<arg name="allow_trajectory_execution" value="false"/>
</include>
<include file="$(find tx60l_final3)/launch/moveit_rviz.launch"/>
</launch>
Edit (no gazebo-part in urdf): See here the Terminal-Output.
Info: Removing and adding "MotionPlanning" inside Rviz didn't help.
Edit (working Links): Here you can download my robot-description. Here you can download my urdf-folder.
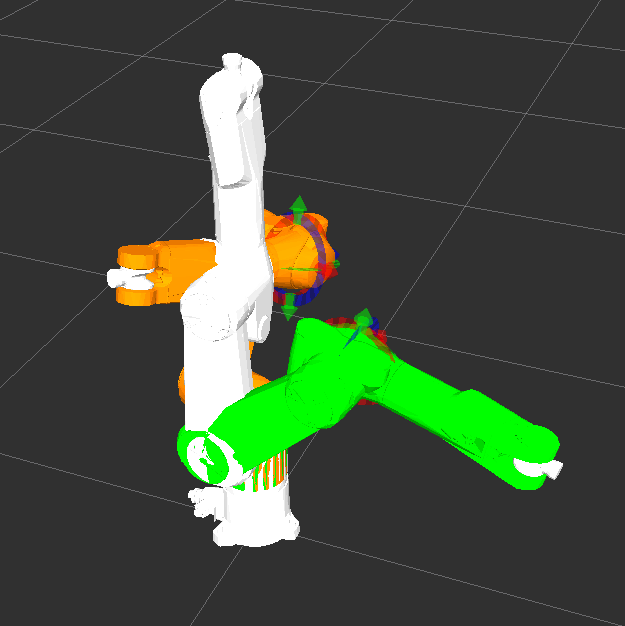
Update: If I set the "fixed_frame" to a link of the robot itself, interactive markers for joint a4 show up. (See picture below) But I need interactive markers in joint5. If I let "fixed_frame" set on "base_footprint" or "odom_combined" (as it should be, I think) and "plan and execute" for a random query MoveIt! crashes (output)
Update: Now the interactive markers work correctly. Many Thanks to all supporters.
viovio


Please mark an answer as correct, so the question is flagged as "answered". Glad it's working for you! Consider looking into http://ros.org/wiki/Industrial, which has several tutorials and templates for controlling your industrial robot through ROS. We'd love to add support for Staubli to ROS-I !
did you tried to connect that to real robot or the simulator ?