
how to calculate the odometry for irobot create robot
Hi,
I'm trying to understand how the odometry is calculated in irobot_create_2_1 driver. I spent lots of time trying to figure out where the minus sign comes from in y=-sin(th)*d, on the 53th line in driver.py. I've included the code snippet. I also included the odometry calculation part in turtlebot_node.py from turtlebot stack, which does the same thing but easier for me to understand.
Can anyone give me a hint or let me know where I can find good resource on mobile robot odometry/kinematics in order to understand the whole scenario. Thanks
From driver.py
00046 d = self.create.d_distance / 1000.
00047 th = self.create.d_angle*pi/180
00048 dx = d / elapsed
00049 dth = th / elapsed
00050
00051 if (d != 0):
00052 x = cos(th)*d
00053 y = -sin(th)*d
00054 self.x = self.x + (cos(self.th)*x - sin(self.th)*y)
00055 self.y = self.y + (sin(self.th)*x + cos(self.th)*y)
00056
00057 if (th != 0):
00058 self.th = self.th + th
From turtlebot_node.py
# this is really delta_distance, delta_angle
d = sensor_state.distance * self.odom_linear_scale_correction #correction factor from calibration
angle = sensor_state.angle * self.odom_angular_scale_correction #correction factor from calibration
x = cos(angle) * d
y = -sin(angle) * d
last_angle = self._pos2d.theta
self._pos2d.x += cos(last_angle)*x - sin(last_angle)*y
self._pos2d.y += sin(last_angle)*x + cos(last_angle)*y
self._pos2d.theta += angle
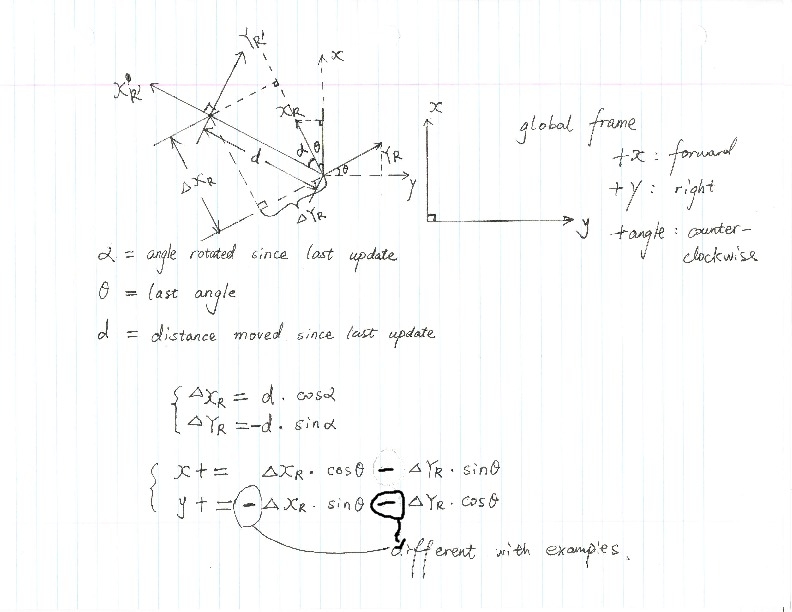
I've attached my calculation as below, can someone point out where went wrong?
add a comment

