
RoboEarth detection performance
Hej,
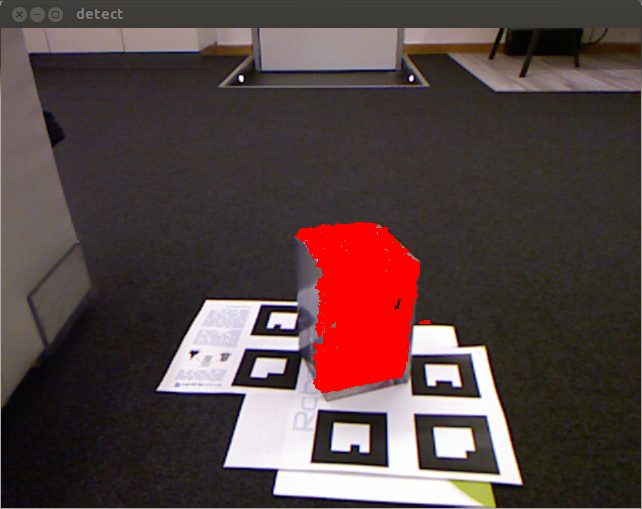
I just got RoboEarth up and running but observe a very bad detection rate. For testing I used a textured box and a redbull can. Both were scanned according to the tutorial. The Box scan looks nice but the detection rate pretty poor. Frome some angles the box is not detected at all. Sometimes it is detected but not very stable, such that it switches very often betwen detected/not detected.
The second item is a red bull can. It's scan looks pretty distorted. I scanned it very often but this is the best I got. Probably due to Kinect issues (reflection, angle, noise, ...) This model is not detected at all. Neither with Kinect, nor with the vision detector. 
So the question is: Is this as good as it gets with RoboEarth or am I missing something here? Is there another working stack out there which performs a better 3D object recognition? (I tried Willowgarages ORC, but it wouldn't work at all)
And some related questions: How does RoboEarths kinect detector work? It seems, that it just matches bruteforcefully every single model scan against the incomming pointcloud and tries to find a Pose with small error.
Is there a scan postprocessing step (noise reduction, outlier removal, reduction of number of points/complexity, meshing, PCA, low pass filter, ...)? How does noise effect the detection? How many scans are neccessary? Whats the detection range?
