
shadow_hand spawn on gazebo electric don't move

hi,
i have an haptic glove, and im using it to move the fingers of the shadow hand spawn on gazebo electric. first i was working on fuerte and doesn't a problem all was good, but i have to down to electric for collision part that i need and on fuerte gazebo version is broken.
the values of sensors are publishing on this topics
sh_mfj3_mixed_position_velocity_controller/command
sh_mfj0_mixed_position_velocity_controller/command
sh_lfj3_mixed_position_velocity_controller/command
sh_lfj0_mixed_position_velocity_controller/command
sh_ffj3_mixed_position_velocity_controller/command
sh_ffj0_mixed_position_velocity_controller/command
well, the same sh_xf#_mixed_position_velocity_controller/command for the 5 fingers.
to spawn shadow_hand i use
roslaunch sr_hand gazebo_hand.launch
EDIT:
well i'm thinking is an error or here miss something. see when i run this on fuerte the rxgraph show me the node of the communication and the publishin on the topics of contrtollers like see in the image 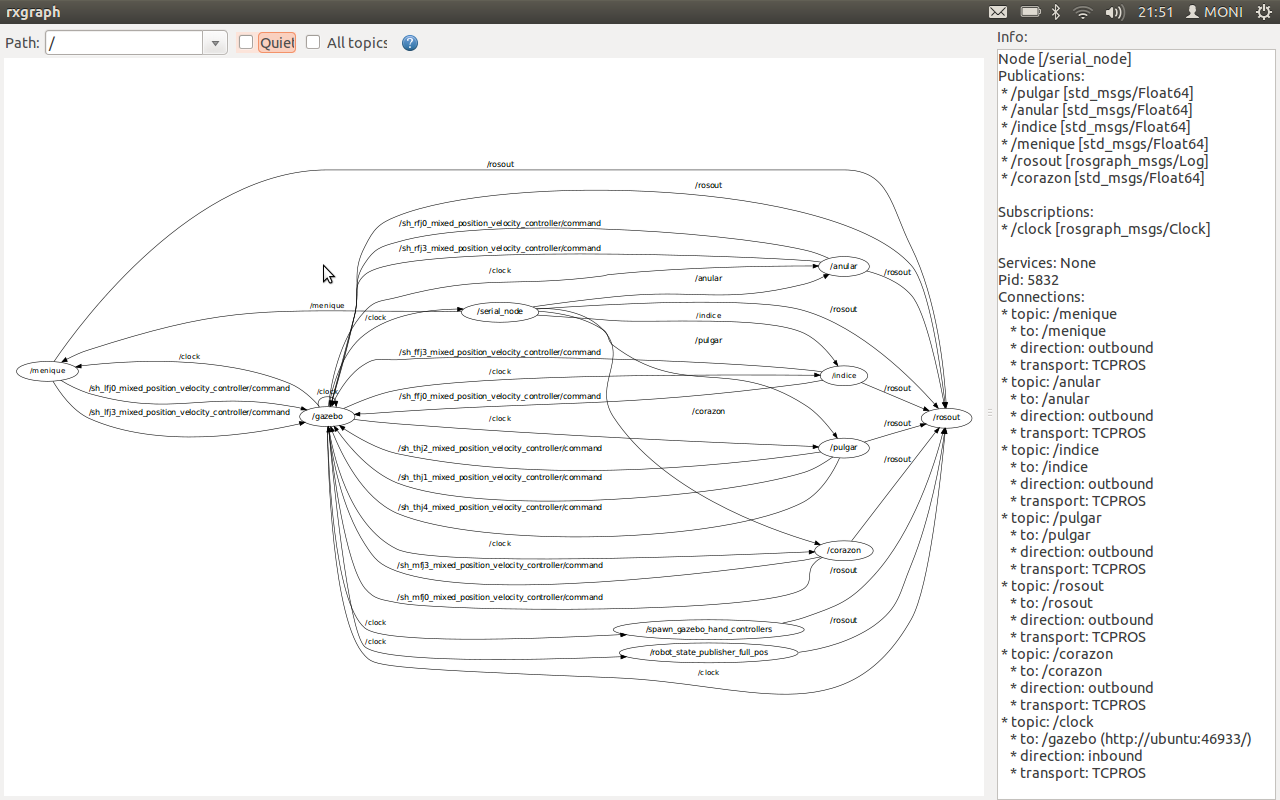
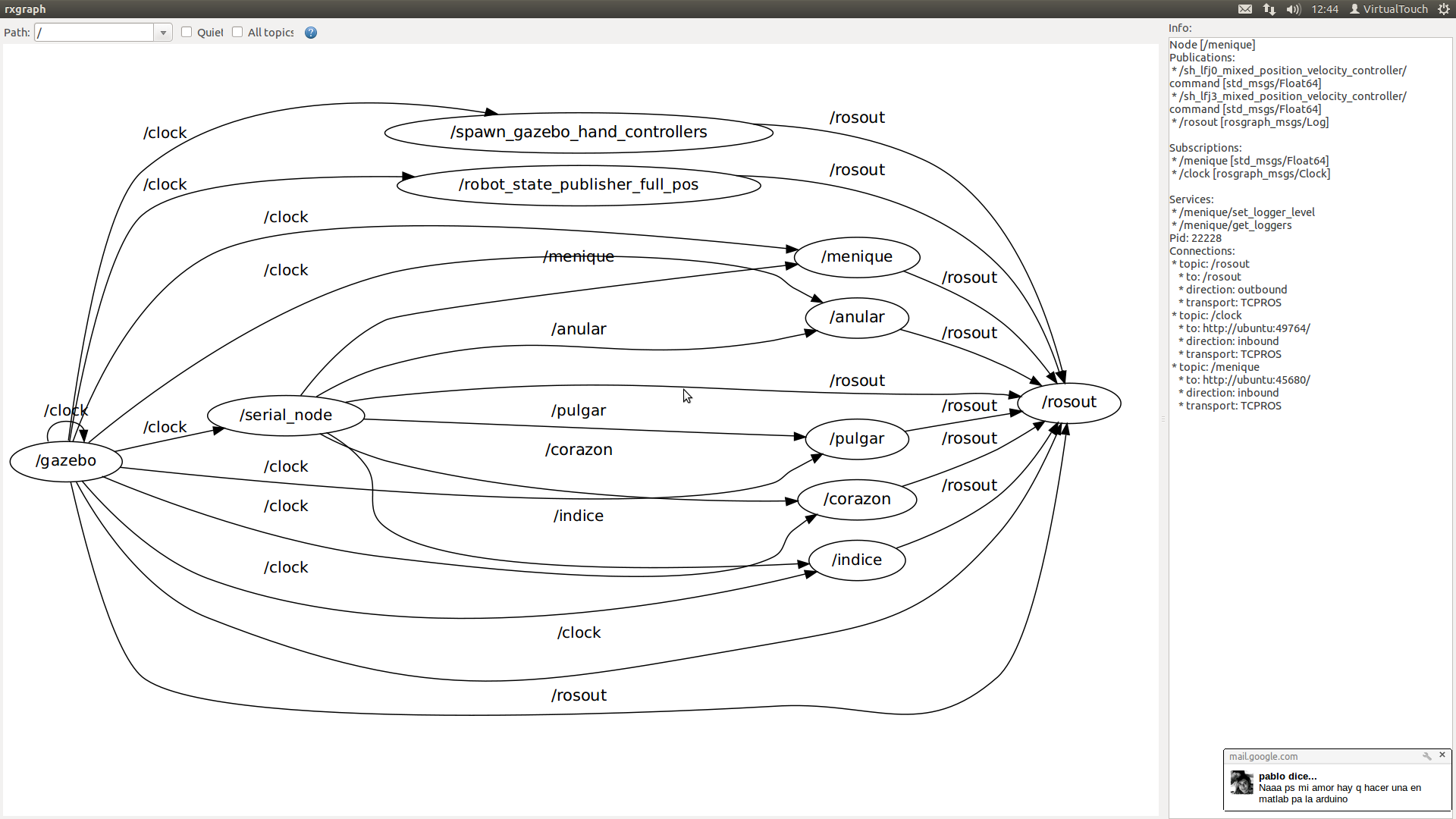
but it electric is happenin this
here is like the hand looks after some minutes, and nothing happens when is running rostopic pub 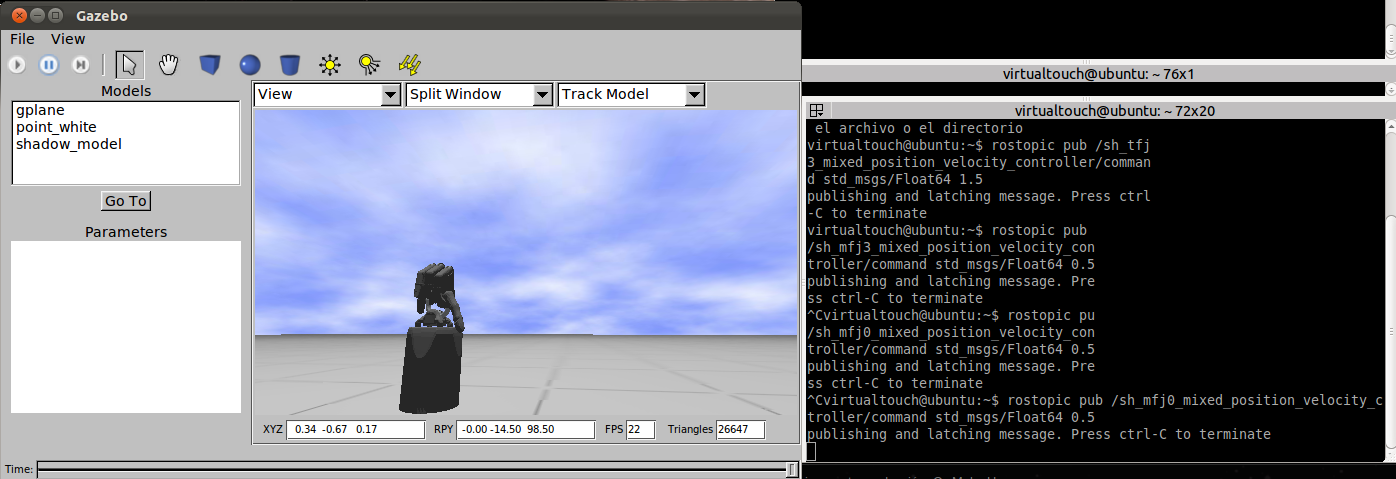
Log when run roslaunch sr_hand gazebo_hand.launch
> virtualtouch@ubuntu:~$ roslaunch sr_hand gazebo_hand.launch
... logging to /home/virtualtouch/.ros/log/cb943592-7169-11e2-8331-001e8cf5030c/roslaunch-ubuntu-2015.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://ubuntu:55616/
SUMMARY
========
PARAMETERS
* /sh_ffj3_mixed_position_velocity_controller/velocity_pid/friction_deadband
* /use_sim_time
* /sh_thj4_mixed_position_velocity_controller/position_pid/min_velocity
* /sh_rfj3_mixed_position_velocity_controller/type
* /sh_wrj2_mixed_position_velocity_controller/velocity_pid/friction_deadband
* /sh_wrj1_mixed_position_velocity_controller/velocity_pid/d
* /sh_thj5_mixed_position_velocity_controller/joint
* /sh_thj1_mixed_position_velocity_controller/joint
* /sh_thj3_mixed_position_velocity_controller/position_pid/min_velocity
* /sh_thj1_mixed_position_velocity_controller/type
* /sh_rfj4_mixed_position_velocity_controller/position_pid/p
* /sh_mfj3_mixed_position_velocity_controller/position_pid/max_velocity
* /sh_thj1_mixed_position_velocity_controller/velocity_pid/i_clamp
* /sh_thj4_mixed_position_velocity_controller/position_pid/position_deadband
* /sh_mfj0_mixed_position_velocity_controller/position_pid/position_deadband
* /sh_thj2_mixed_position_velocity_controller/position_pid/max_velocity
* /sh_thj2_mixed_position_velocity_controller/type
* /sh_mfj3_mixed_position_velocity_controller/position_pid/min_velocity
* /sh_lfj3_mixed_position_velocity_controller/position_pid/d
* /sh_wrj2_mixed_position_velocity_controller/position_pid/position_deadband
* /sh_rfj3_mixed_position_velocity_controller/velocity_pid/friction_deadband
* /sh_rfj3_mixed_position_velocity_controller/position_pid/max_velocity
* /sh_lfj0_mixed_position_velocity_controller/position_pid/min_velocity
* /sh_ffj4_mixed_position_velocity_controller/type
* /sh_lfj5_mixed_position_velocity_controller/type
* /sh_ffj0_mixed_position_velocity_controller/position_pid/i
* /sh_mfj4_mixed_position_velocity_controller/velocity_pid/friction_deadband
* /sh_rfj3_mixed_position_velocity_controller/position_pid/i_clamp
* /sh_wrj2_mixed_position_velocity_controller/velocity_pid/p
* /sh_lfj4_mixed_position_velocity_controller/velocity_pid/d
* /sh_mfj3_mixed_position_velocity_controller/position_pid/d
* /sh_ffj0_mixed_position_velocity_controller/type
* /sh_wrj1_mixed_position_velocity_controller/position_pid/min_velocity
* /sh_lfj5_mixed_position_velocity_controller/velocity_pid/max_force
* /sh_wrj2_mixed_position_velocity_controller/velocity_pid/i
* /sh_thj5_mixed_position_velocity_controller/position_pid/d
* /sh_lfj5_mixed_position_velocity_controller/position_pid/position_deadband
* /sh_thj5_mixed_position_velocity_controller/position_pid/min_velocity
* /sh_thj2_mixed_position_velocity_controller/velocity_pid/max_force
* /sh_thj2_mixed_position_velocity_controller/position_pid/d
* /sh_rfj0_mixed_position_velocity_controller/velocity_pid/max_force
* /sh_wrj2_mixed_position_velocity_controller/velocity_pid/d
* /sh_thj2_mixed_position_velocity_controller/velocity_pid/friction_deadband
* /sh_ffj4_mixed_position_velocity_controller/joint
* /sh_rfj3_mixed_position_velocity_controller/position_pid/position_deadband
* /sh_wrj1_mixed_position_velocity_controller/velocity_pid/i
* /sh_lfj5_mixed_position_velocity_controller/velocity_pid/i
* /sh_thj5_mixed_position_velocity_controller/position_pid/i_clamp
* /sh_ffj3_mixed_position_velocity_controller/velocity_pid/i
* /sh_lfj4_mixed_position_velocity_controller/velocity_pid/i_clamp
* /sh_wrj1_mixed_position_velocity_controller/position_pid/max_velocity
* /sh_ffj3_mixed_position_velocity_controller/velocity_pid/d
* /sh_lfj5_mixed_position_velocity_controller/position_pid/i_clamp
* /sh_ffj4_mixed_position_velocity_controller/velocity_pid/i_clamp
* /sh_mfj4_mixed_position_velocity_controller/position_pid/position_deadband
* /sh_thj4_mixed_position_velocity_controller/position_pid/max_velocity
* /sh_ffj4_mixed_position_velocity_controller/velocity_pid/p
* /sh_lfj3_mixed_position_velocity_controller/velocity_pid/p
* /sh_mfj3_mixed_position_velocity_controller/velocity_pid/p
* /sh_thj2_mixed_position_velocity_controller/position_pid/min_velocity
* /sh_thj4_mixed_position_velocity_controller/velocity_pid/p
* /sh_thj4_mixed_position_velocity_controller/type
* /sh_lfj3_mixed_position_velocity_controller/velocity_pid/i
* /sh_mfj3_mixed_position_velocity_controller/velocity_pid/i
* /sh_ffj3_mixed_position_velocity_controller/joint
* /sh_thj4_mixed_position_velocity_controller/velocity_pid/i
* /sh_ffj4_mixed_position_velocity_controller/velocity_pid/d
* /sh_wrj2_mixed_position_velocity_controller/position_pid/max_velocity
* /sh_ffj4_mixed_position_velocity_controller/velocity_pid/i
* /sh_thj4_mixed_position_velocity_controller/velocity_pid/d
* /sh_lfj3_mixed_position_velocity_controller/velocity_pid/friction_deadband
* /sh_wrj1_mixed_position_velocity_controller/type
* /sh_lfj3_mixed_position_velocity_controller/velocity_pid/d
* /sh_rfj4_mixed_position_velocity_controller/velocity_pid/p
* /sh_ffj0_mixed_position_velocity_controller/position_pid/min_velocity
* /robot_state_publisher_full_pos/publish_frequency
* /sh_ffj4_mixed_position_velocity_controller/position_pid/i
* /sh_rfj0_mixed_position_velocity_controller/position_pid/d
* /sh_ffj4_mixed_position_velocity_controller/position_pid/d
* /sh_ffj0_mixed_position_velocity_controller/position_pid/position_deadband
* /sh_mfj0_mixed_position_velocity_controller/position_pid/max_velocity
* /sh_thj3_mixed_position_velocity_controller/type
* /sh_mfj3_mixed_position_velocity_controller/velocity_pid/max_force
* /sh_ffj0_mixed_position_velocity_controller/velocity_pid/friction_deadband
* /sh_thj3_mixed_position_velocity_controller/velocity_pid/i_clamp
* /sh_ffj4_mixed_position_velocity_controller/position_pid/p
* /sh_mfj3_mixed_position_velocity_controller/joint
* /sh_lfj4_mixed_position_velocity_controller/type
* /sh_thj2_mixed_position_velocity_controller/position_pid/p
* /sh_thj3_mixed_position_velocity_controller/position_pid/max_velocity
* /sh_thj5_mixed_position_velocity_controller/position_pid/max_velocity
* /sh_thj2_mixed_position_velocity_controller/joint
* /sh_lfj0_mixed_position_velocity_controller/type
* /sh_lfj0_mixed_position_velocity_controller/velocity_pid/friction_deadband
* /sh_ffj3_mixed_position_velocity_controller/type
* /sh_wrj2_mixed_position_velocity_controller/position_pid/p
* /sh_lfj3_mixed_position_velocity_controller/position_pid/i_clamp
* /sh_rfj0_mixed_position_velocity_controller/velocity_pid/p
* /sh_rfj3_mixed_position_velocity_controller/velocity_pid/max_force
* /sh_thj2_mixed_position_velocity_controller/position_pid/position_deadband
* /sh_rfj0_mixed_position_velocity_controller/position_pid/max_velocity
* /sh_lfj0_mixed_position_velocity_controller/velocity_pid/max_force
* /sh_ffj4_mixed_position_velocity_controller/velocity_pid ...
what does
rostopic echo /sh_mfj3_mixed_position_velocity_controller/commandreturn? And what happens if you do:rostopic pub /sh_mfj3_mixed_position_velocity_controller/command std_msgs/Float64 1.0?well if i run rostopic echo, shows me the values of the sensor, but don't move, and if i run rostopic pub , doesn't move
Is gazebo properly running? Are you getting the data from gazebo? (
rostopic echo /joint_states(or mayberostopic echo /gazebo/joint_states?)i though gazebo was properly running, but in fact whe run gazebo/joint_states , don't show me anuthing and i get a WARNING: no messages received and simulated time is active. Is /clock being published? . and it's suppose i have running gazebo with the hand. :'( :S
Could I get the full log for the command: "roslaunch sr_hand gazebo_hand.launch" ?
i don't know what happen 'cause i tried installing ros-Groovy altough is kind slowly , the same thing is happenin, the shadow , don't move.
From what I see in the log you added, you haven't built sr_gazebo_plugins. To make sure you build everything needed, you should build the whole stack (rosmake shadow_robot).
well i did the rosmake shadow_robot but it gives to me an error, i edit the question with the answer i did to the export of the package path and th source ~/shadow/setup.bash