
What are good Kinect gmapping parameters?

I noticed in the gmapping documentation, it says "This version is optimized for long-range laser scanners ... short range lasers ... will not work that well with the standard parameter settings.".
I was wondering what parameters people have been successfully using for Kinect-based navigation? (My results so far have been less than perfect)
Thanks, -Jon
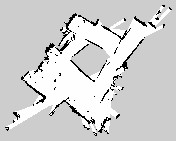
Here is what the map looks like. My method was: drive into an empty space, and rotate in a circle, then move on to a new space:
--- Edit ---
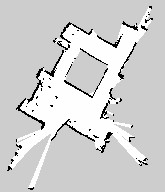
Here's what the map looks like when I make sure to always have a corner in the field of view when moving to a new part of the map. It's much, much better:


Actually I think if you are doing indoors stuff the short range of the kinect isn't really that much of a problem in comparison to the very limited field of view (55 deg vs. 180-270 deg of common lasers).
Ok, that makes sense. It seems to do a good job building a map when it sees two walls in the same field of view, but not when it has to rotate from one wall to the other.
Yep, tried again making sure I always had a corner in view, and it does much better. Unfortunately, I think that means it probably won't be able to autonomously build a map, without some heavy-duty programming.
It would really help if I could save the map half-way through and use that as the initial map when restarting because it takes so long to map the house and it often screws up half-way through. I think I'll open a new question.
@domhege, if you post the answer "Use the default parameters, and make sure you always have a corner in the field of view", I'll mark that as the correct answer.
By the way - I just upgraded the laptop on my robot (from a single core pentium to a dual core core i3), and it seems to do the mapping much better. I can be a little more careless about my driving and still get a pretty good map.