
Hector mapping does not display the map well

Hello
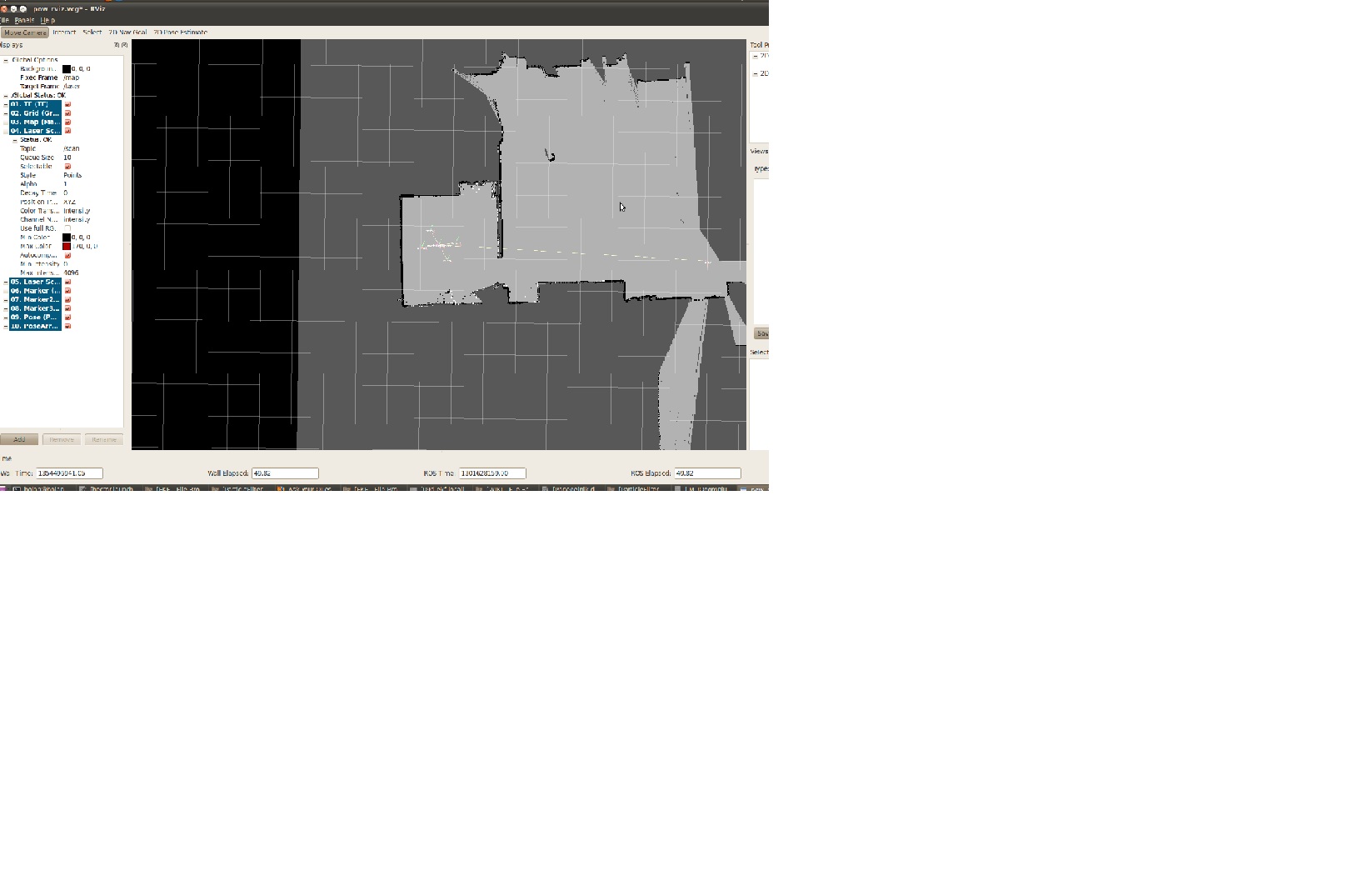
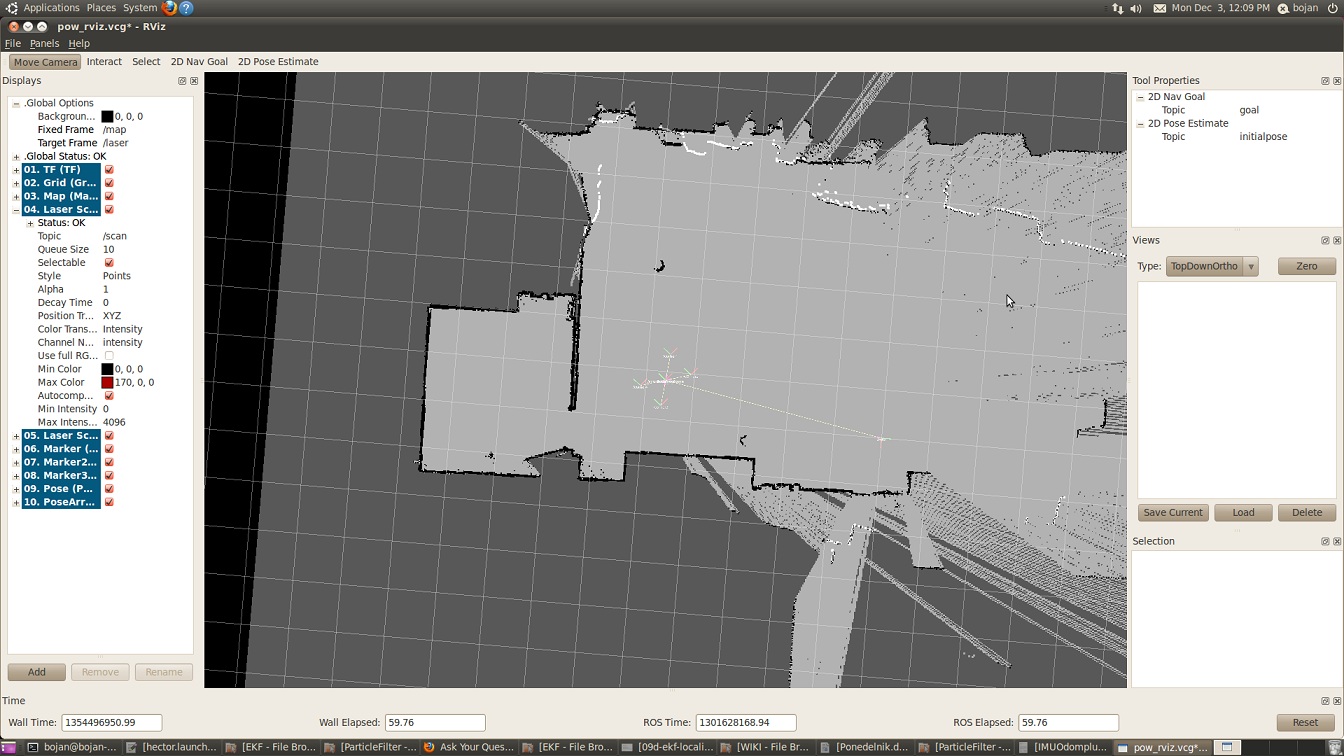
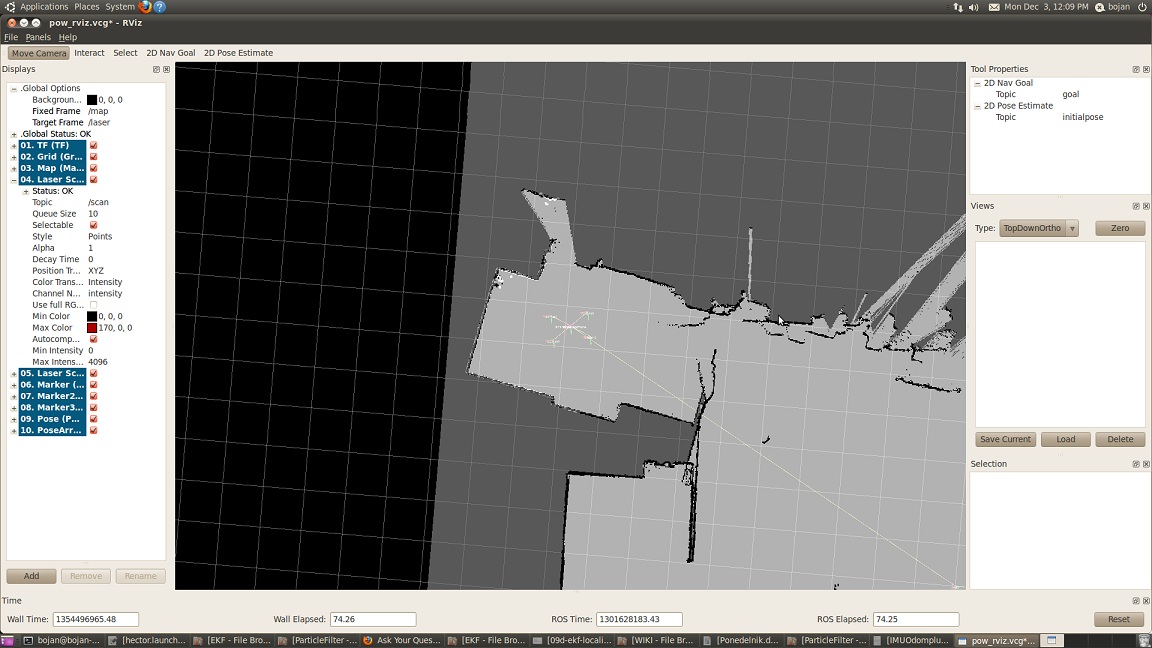
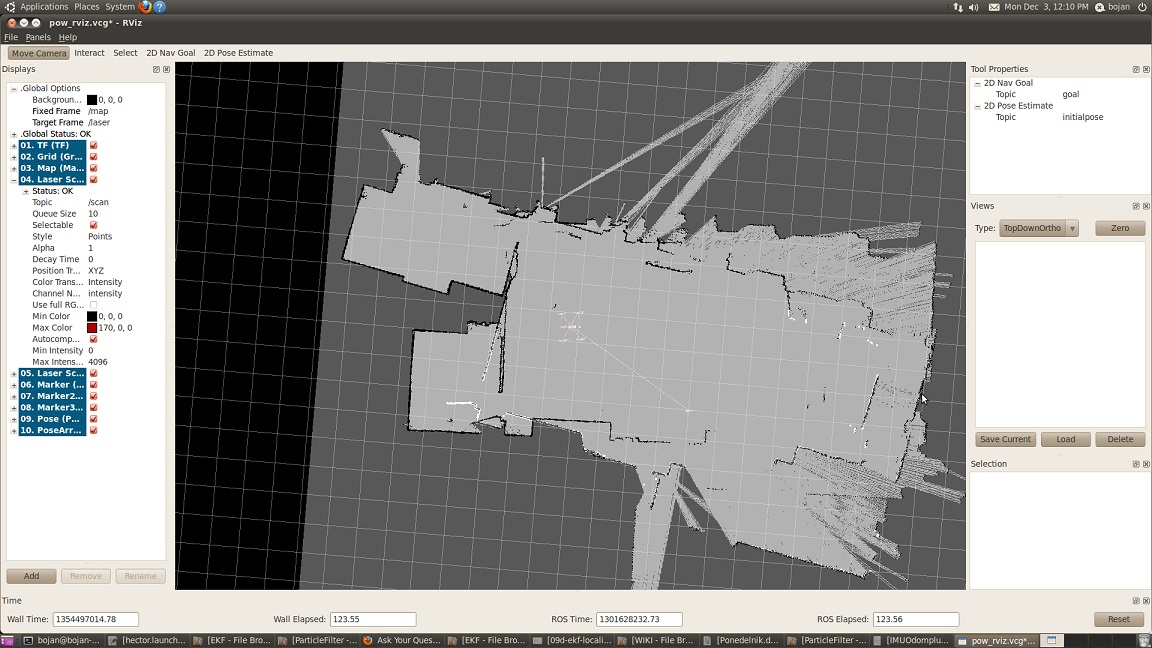
Im using hector mapping and have some small problems. I installed and compile the package. Than tried to load the map. At the beginning was working good, was loading the map from the bag file. Im using only laser and IMU as a sensor package and do not have any encoders ( so I do not have any odometry). After playing a different bag files I have some problems with the map. Actually the laser was not matching correctly the map during playing the bag file. I post a picture of the mapping . So you can see also my setting of the rviz and the launch file as well.
This is the launch file
<launch>
<param name="/use_sim_time" value="true"/>
<node name="rosplay" pkg="rosbag" type="play" args="/home/bojan/svn/POW/ROS/Fuerte/Data/User1/pow_freek_3_2011-04-01-14-21-48.bag --clock"/>
<node pkg="tf" type="static_transform_publisher" name="baselink_laser" args="0 0 0 0 0 0 /base_link /laser 100"/>
<node pkg="tf" type="static_transform_publisher" name="corner_a" args="0.45 0.3 0 0 0 0 /base_link /corner1 10"/>
<node pkg="tf" type="static_transform_publisher" name="corner_b" args="0.45 -0.3 0 0 0 0 /base_link /corner2 10"/>
<node pkg="tf" type="static_transform_publisher" name="corner_c" args="-0.45 -0.3 0 0 0 0 /base_link /corner3 10"/>
<node pkg="tf" type="static_transform_publisher" name="corner_d" args="-0.45 0.3 0 0 0 0 /base_link /corner4 10"/>
<node name="hector_mapping" pkg="hector_mapping" type="hector_mapping" output="screen">
<param name="pub_map_odom_transform" value="true"/>
<param name="map_frame" value="map"/>
<param name="base_frame" value="base_link"/>
<param name="odom_frame" value="base_link"/>
</node>
<node pkg="rviz" type="rviz" output="screen" name="rviz" args="-d $(find pow_analyzer)/launch/pow_rviz.vcg"/>
</launch>
And this are the shots of the rviz
Here still all ok
And now starting the troubles
Any help?
add a comment


