
Simulated Kinect far clip [closed]

Hi,
I'm having problem with simulated Kinect (ROS Electric). My URDF (for custom robot similar to Turtlebot) for kinect looks like this:
<sensor:camera name="camera">
<imageFormat>R8G8B8</imageFormat>
<imageSize>640 480</imageSize>
<hfov>57</hfov>
<nearClip>0.4</nearClip>
<farClip>5.0</farClip>
<updateRate>10</updateRate>
<baseline>0.1</baseline>
<controller:gazebo_ros_openni_kinect name="kinect_camera_controller" plugin="libgazebo_ros_openni_kinect.so">
<alwaysOn>true</alwaysOn>
<updateRate>10</updateRate>
<pointCloudCutOff>0.001</pointCloudCutOff>
<imageTopicName>/cam3d/rgb/image_raw</imageTopicName>
<pointCloudTopicName>/cam3d/depth/points</pointCloudTopicName>
<cameraInfoTopicName>/cam3d/camera_info</cameraInfoTopicName>
<depthImageTopicName>/cam3d/depth/image_raw</depthImageTopicName>
<depthImageInfoTopicName>/cam3d/depth/camera_info</depthImageInfoTopicName>
<frameName>camera_depth_optical_frame</frameName>
<distortion_k1>0.00000001</distortion_k1>
<distortion_k2>0.00000001</distortion_k2>
<distortion_k3>0.00000001</distortion_k3>
<distortion_t1>0.00000001</distortion_t1>
<distortion_t2>0.00000001</distortion_t2>
</controller:gazebo_ros_openni_kinect>
</sensor:camera>
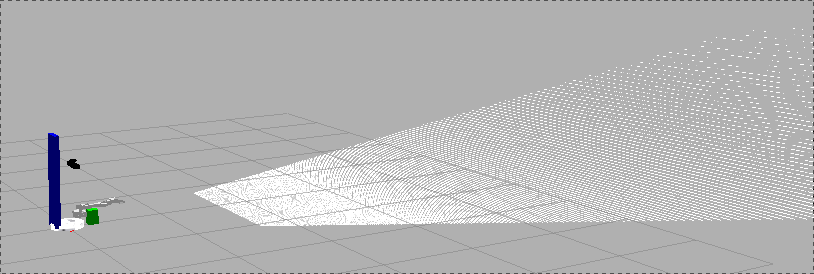
It's based on TB URDF with some modifications. Problem is that depth values in point cloud are not limited, as you can see in picture. While when running simulation of TB, values are ok.
Any idea? Many thanks.
UPDATE: I've noticed that it's same also with simulation of Care-O-Bot, so it seems to be some common problem of Gazebo, right?
Closed for the following reason
question is not relevant or outdated by
tfoote
close date 2015-03-03 02:09:48.083321
add a comment
