
Extrapolation Error: Lookup would require extrapolation 0.285000000s into the future. Requested time 147.672000000 but the latest data is at time 147.387000000, when looking up transform from frame [world] to frame [map]
How do I fix this error please? I kept reading solutions to check the tf tree the transforms but I don't know what to check or how to interpret the data. Already tried adjusting the update_min_a and update_min_d on amcl hoping that it fasten its frequency I also adjusted the transform tolerance. Also I set use_sim_time to true. What else?
Here's the error

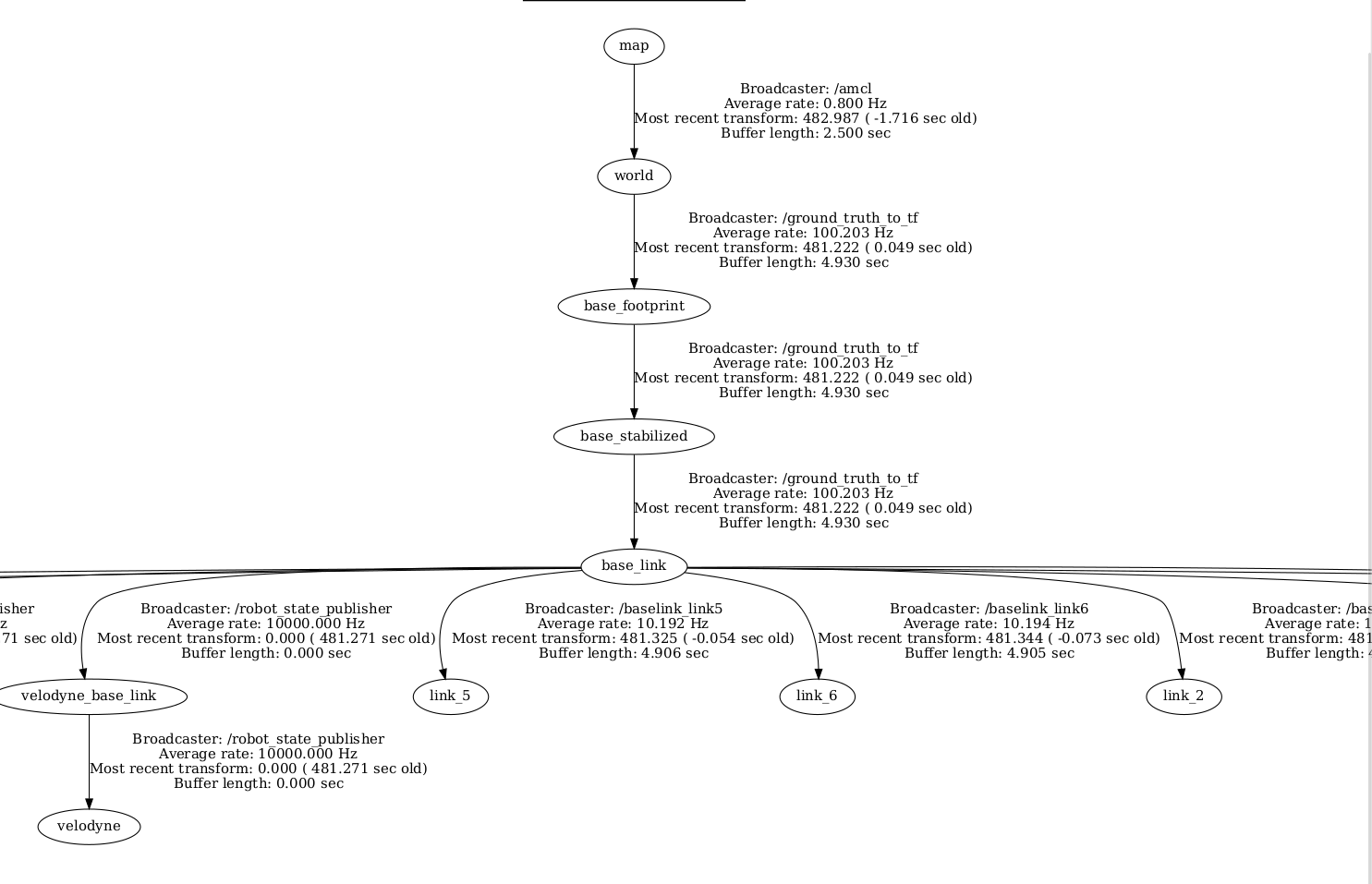
Here's my tf tree between map and world
And here is the results of tf_monitor world to map
RESULTS: for world to map
Chain is: world -> map
Net delay avg = -0.873489: max = 0
Frames:
All Broadcasters:
Node: unknown_publisher 164.932 Hz, Average Delay: -0.0251408 Max Delay: 0.047
Node: unknown_publisher(static) 1e+08 Hz, Average Delay: 0 Max Delay: 0
And map to world
RESULTS: for map to world
Chain is: map -> world
Net delay avg = -0.875003: max = 0
Frames:
All Broadcasters:
Node: unknown_publisher 167.153 Hz, Average Delay: -0.024843 Max Delay: 0.047
Node: unknown_publisher(static) 1e+08 Hz, Average Delay: 0 Max Delay: 0

How do you call the transformation on TF buffer? Are you using tf 1 or tf 2?
I had this same error before and it's related to how you call the look up transform function.
In your next questions please publish the error msg as text. It's easy to read and to google in here.
HI! Can you share the code snippet causing the error, please? Are you already using something like
listener.waitForTransform("world", "map", rospy.Time(), rospy.Duration(2.0))to wait for the most recent transform to become available? Are you working on a single or on multiple machines?Also, just for you to know in the future, it is preferable to copy/paste the error message itself (or any other output message), rather than uploading a screenshot. Sorry for being so pedantic.
Extrapolation Error: Lookup would require extrapolation 0.262000000s into the future. Requested time 171.241000000 but the latest data is at time 170.979000000, when looking up transform from frame [world] to frame [map]
Could not transform the global plan to the frame of the controller
Here's a text of the error message.
I am just using move_base node with amcl as my localization. so I have no idea which source code is causing the problem. but i have these parameters for reference Controller frequency: 10Hz Hokuyo Scanner Rate: 20Hz local costmap update: 5Hz local costmap publish: 2Hz
my odom frame is name "World"
Are you working on multiple machines?