
TF_REPEATED_DATA warning ignoring data with redundant timestamp for frame base_link| Where is the redundancy coming from?
Hi All,
Just migrated to Ros Noetic. I am using using robot_localization to fuse odometry and IMU data and AMCL with the Navigation package. I disabled TF publishing in the robot Localization. Below is the rqt graph I cant understand where the redundancy is coming form any thoughts?
Regards, 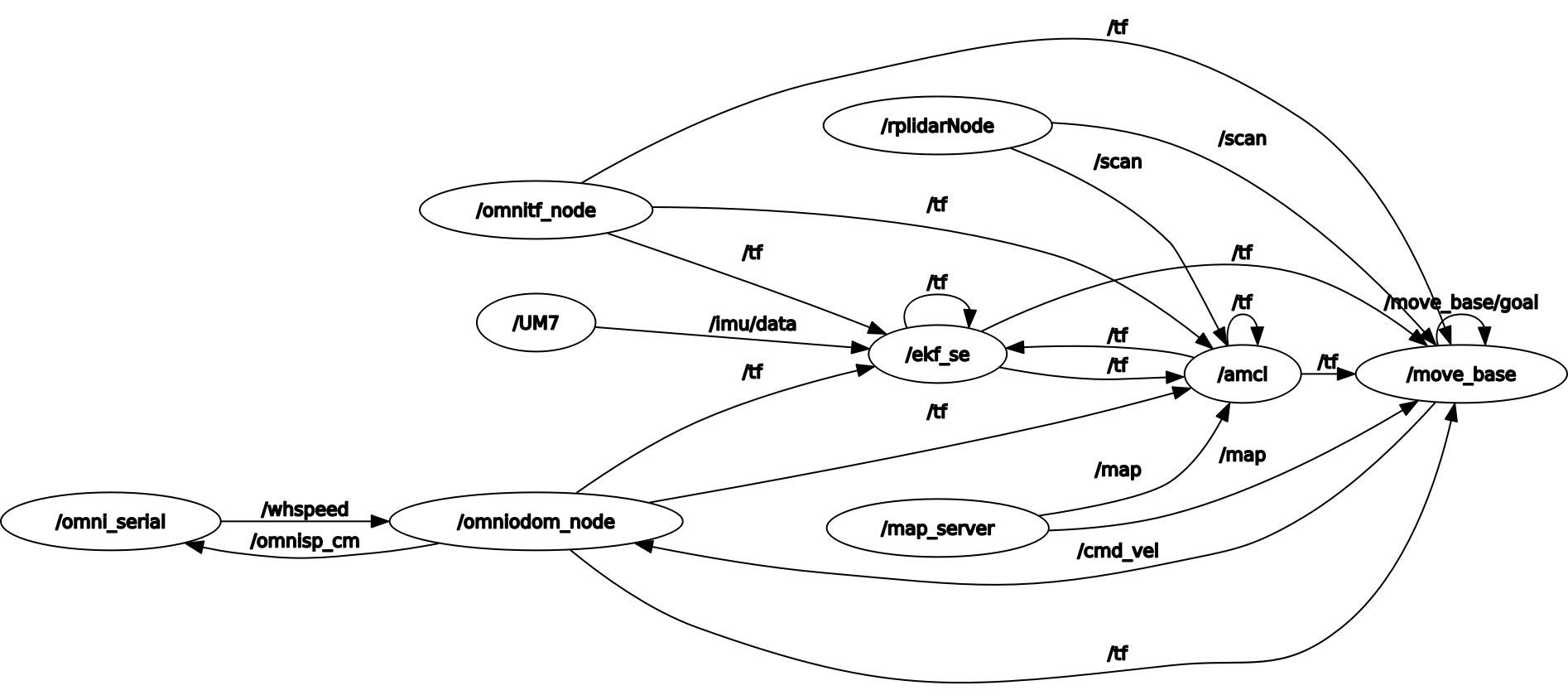
add a comment

