
robot_localization /map /odom drift

Hello everyone,
I use ROS2 Foxy along with robot_localization. I have a differential wheeled robot with odometry and 2 GPS rtk for position and heading.
The sensors work properly independently. I have a clean odometry track and the heading is working fine. The problem occurs when I merge them using robot_localization, with two ekf_localisation_node (local and global) and one navsat_transform_node. I observe a shift/drift between /map and /odom frames and I have my odometry track which is getting disturbed.
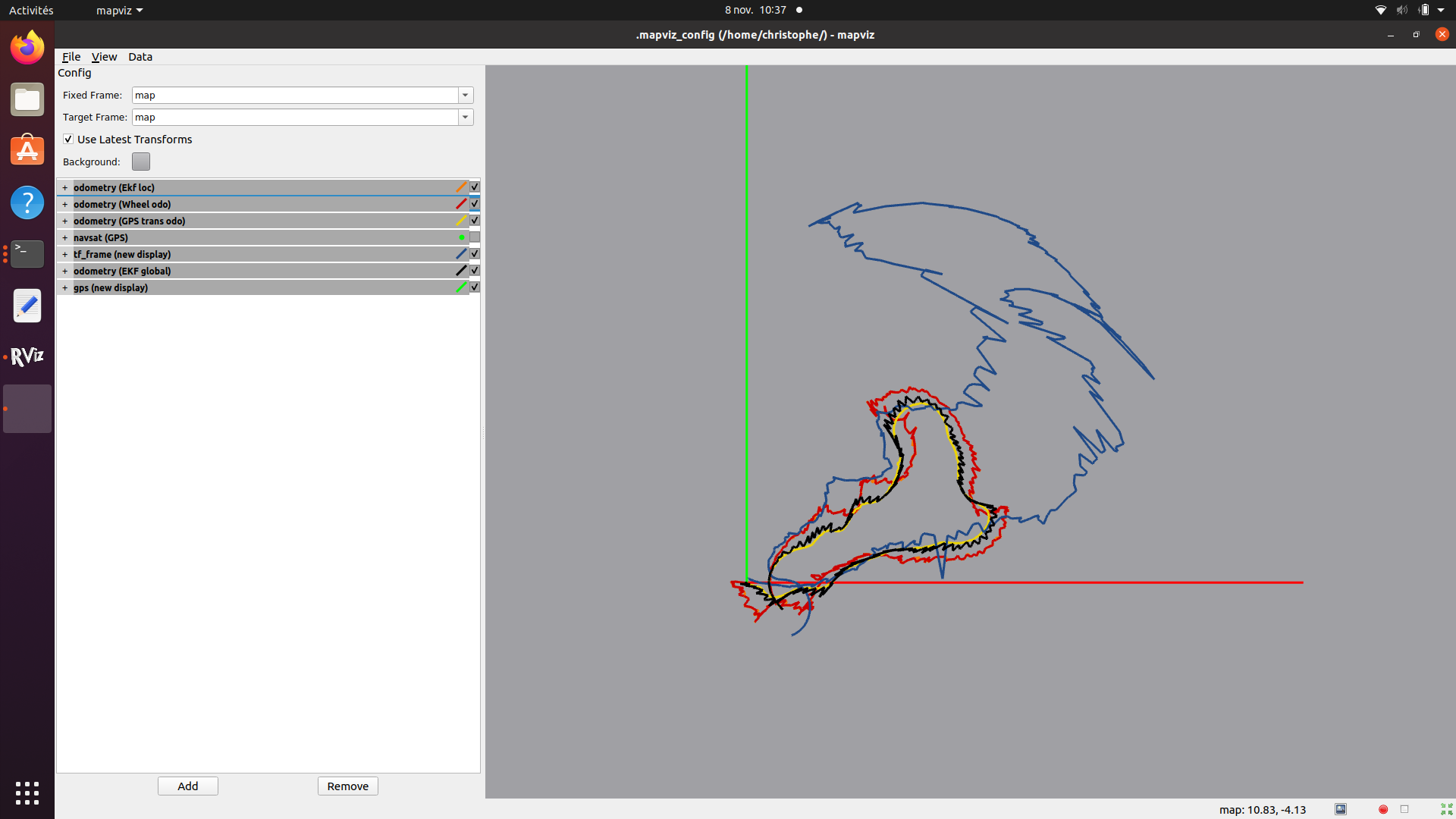
Under mapviz, using /map as fixed and target frame :
- red and orange tracks are similar (/odom and /odometry/filtered/local)
- yellow track is /odometry/gps
- blue track is tf_frame with /odom frame (which has /map as a direct parent)
- black track is /odometry/filtered/global
The blue track can become completely crazy :
Here are the parameters used in localization.yaml
navsat_transform:
ros__parameters:
magnetic_declination_radians: 0.0387
yaw_offset: 0.0
zero_altitude: true # True if operating in 2D
publish_filtered_gps: true
use_odometry_yaw: true
wait_for_datum: false
use_local_cartesian: false
frequency: 30.0 # Hz
delay: 0.0 # Seconds
transform_timeout: 0.0
broadcast_utm_transform: false
broadcast_utm_transform_as_parent_frame: false
ekf_local:
ros__parameters:
frequency: 30.0 # Hz
sensor_timeout: 0.1 # Seconds
two_d_mode: true # No 3D information will be used (zero_altitude already set to true)
publish_acceleration: false
publish_tf: true
reset_on_time_jump: false
map_frame: map # Defaults to "map" if unspecified
odom_frame: odom # Defaults to "odom" if unspecified
base_link_frame: base_footprint # Defaults to "base_link" if unspecified
world_frame: odom # Defaults to the value of odom_frame if unspecified
odom0: odom # Wheel odometry
odom0_config: [true, true, false, # [x, y, z]
false, false, true, # [roll, pitch, yaw]
false, false, false, # [x_vel, y_vel, z_vel]
false, false, false, # [roll_vel, pitch_vel, yaw_vel]
false, false, false] # [x_accel, y_accel, z_accel]
odom0_nodelay: true
odom0_differential: false
odom0_relative: false
odom0_queue_size: 30
ekf_global:
ros__parameters:
frequency: 30.0 # Hz
sensor_timeout: 0.1 # Seconds
two_d_mode: true # No 3D information will be used (zero_altitude already set to true)
publish_acceleration: false
publish_tf: true
reset_on_time_jump: false
map_frame: map # Defaults to "map" if unspecified
odom_frame: odom # Defaults to "odom" if unspecified
base_link_frame: base_footprint # Defaults to "base_link" if unspecified
world_frame: map # Defaults to the value of odom_frame if unspecified
odom0: odometry/gps # navsat_transform_node output
odom0_config: [true, true, false, # [x, y, z]
false, false, false, # [roll, pitch, yaw]
false, false, false, # [x_vel, y_vel, z_vel]
false, false, false, # [roll_vel, pitch_vel, yaw_vel]
false, false, false] # [x_accel, y_accel, z_accel]
odom0_nodelay: true
odom0_differential: false
odom0_relative: false
odom0_queue_size: 30
odom1: odom # Wheel odometry
odom1_config: [true, true, false, # [x, y, z]
false, false, false, # [roll, pitch, yaw]
false, false, false, # [x_vel, y_vel, z_vel]
false, false, false, # [roll_vel, pitch_vel, yaw_vel]
false, false, false] # [x_accel, y_accel, z_accel]
odom1_nodelay: true
odom1_differential: false
odom1_relative: false
odom1_queue_size: 30
imu0: gps_heading
imu0_config: [false, false, false, # [x, y, z]
false, false, true, # [roll, pitch, yaw]
false, false, false, # [x_vel, y_vel, z_vel]
false, false, false, # [roll_vel, pitch_vel, yaw_vel]
false, false, false] # [x_accel, y_accel, z_accel]
imu0_nodelay: false
imu0_differential: false
imu0_relative: false
imu0_queue_size: 30
Do you have any idea what is causing this behavior ?
Many thanks
add a comment

