
Robot moves in reality but not in RViz


i am using the navigation stack. I customized all the params in the yaml files .
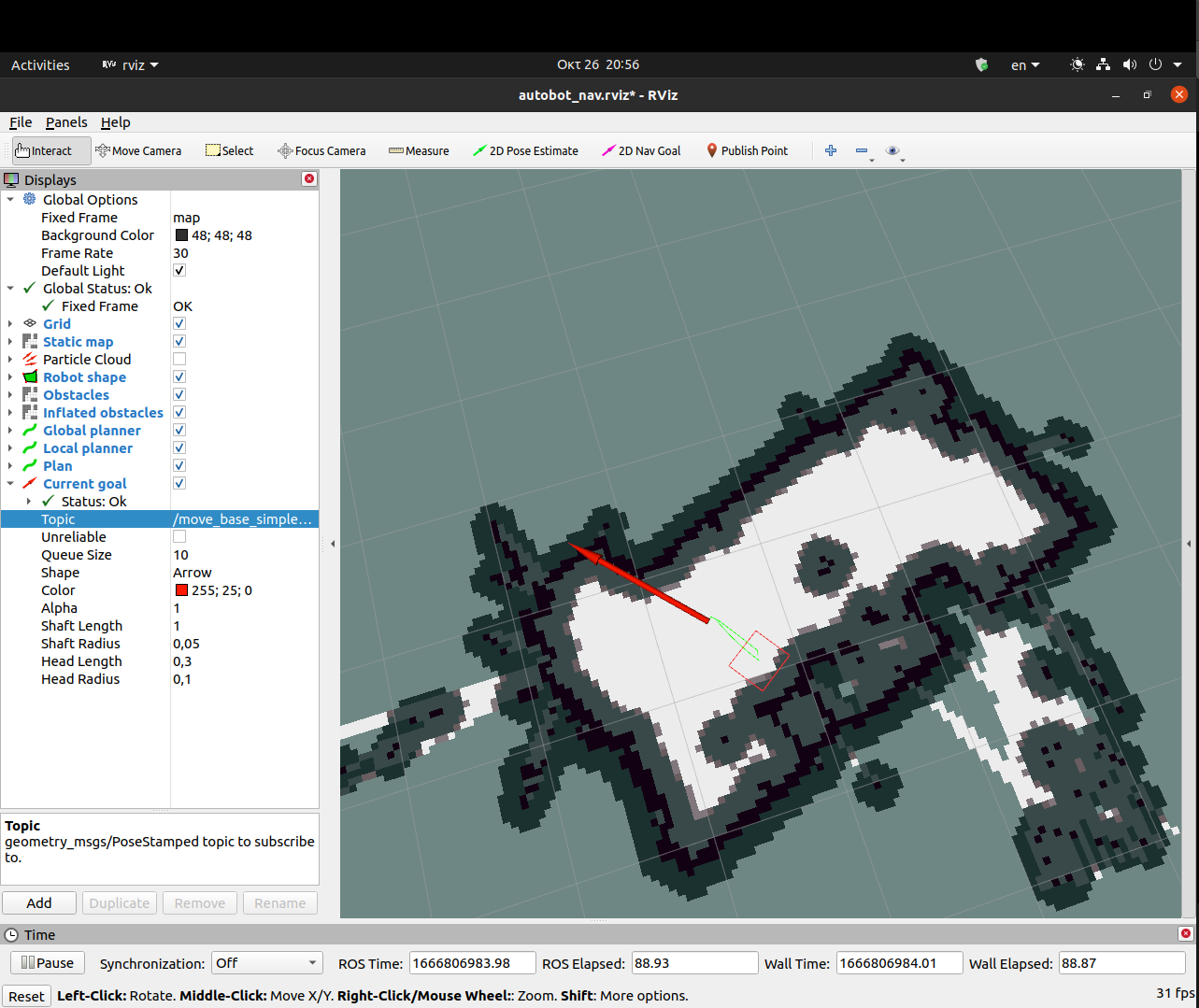
When i launch it i am able too see my robot's pose and set the goal to reach .
After that my robot in real life is moving towards goal .Though the "square" on the map is not moving at all and i have no idea what i am doing wrong. Could someone help me ?
I forgot to mention that i am not using a URDF file. Instead, I am just using a static_transform between base_link and scan.

Is odometry being published?
Yes sir, it is . if i use gmapping the robot moves (in rviz) as expected , but not when i am using a known map with navigation