
FollowPath doesn't fail
Hi!
I am having trouble to enter the recovery mode when my robot gets stuck. The controller server returns:
[controller_server-1] [ERROR] [1658311442.240948437] [controller_server]: Failed to make progress
[controller_server-1] [WARN] [1658311442.241226939] [controller_server_rclcpp_node]: [follow_path] [ActionServer] Aborting handle.
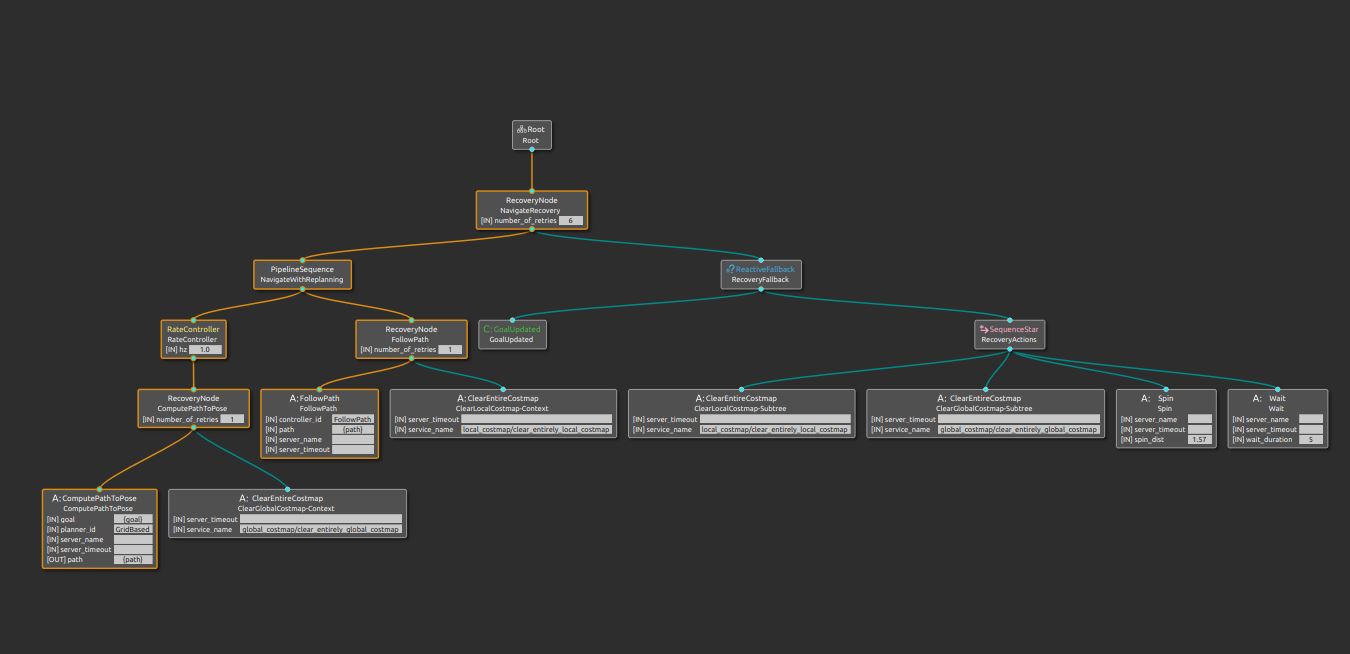
However the BT doesn't move onto the recovery branch:
Here it is my controller configuration:
controller_server:
ros__parameters:
use_sim_time: True
odom_topic: /odom/unfiltered
controller_frequency: 5.0
min_x_velocity_threshold: 0.001
min_y_velocity_threshold: 0.001
min_theta_velocity_threshold: 0.001
progress_checker_plugin: "progress_checker"
goal_checker_plugin: "goal_checker"
controller_plugins: ["FollowPath"]
# Progress checker parameters
progress_checker:
plugin: "nav2_controller::SimpleProgressChecker"
required_movement_radius: 0.2
movement_time_allowance: 20.0
# Goal checker parameters
goal_checker:
plugin: "nav2_controller::SimpleGoalChecker"
xy_goal_tolerance: 0.25
yaw_goal_tolerance: 0.25
stateful: True
# DWB parameters
FollowPath:
plugin: "dwb_core::DWBLocalPlanner"
debug_trajectory_details: True
publish_cost_grid_pc: True
min_vel_x: 0.0
min_vel_y: 0.0
max_vel_x: 4.0
max_vel_y: 4.0
max_vel_theta: 4.5
min_speed_xy: 0.4
max_speed_xy: 4.0
min_speed_theta: 0.0
# Add high threshold velocity for turtlebot 3 issue.
# https://github.com/ROBOTIS-GIT/turtlebot3_simulations/issues/75
acc_lim_x: 2.5
acc_lim_y: 0.0
acc_lim_theta: 3.2
decel_lim_x: -2.5
decel_lim_y: 0.0
decel_lim_theta: -3.2
vx_samples: 20
vy_samples: 10
vtheta_samples: 20
sim_time: 1.2
linear_granularity: 0.5
time_granularity: 1.0
angular_granularity: 0.025
transform_tolerance: 0.2
xy_goal_tolerance: 0.25
trans_stopped_velocity: 0.25
short_circuit_trajectory_evaluation: True
stateful: True
critics: ["RotateToGoal", "Oscillation", "BaseObstacle", "GoalAlign", "PathAlign", "PathDist", "GoalDist", "ObstacleFootprint"]
BaseObstacle.scale: 0.02
ObstacleFootprint.scale: 10.0
PathAlign.scale: 32.0
PathAlign.forward_point_distance: 0.1
GoalAlign.scale: 24.0
GoalAlign.forward_point_distance: 0.1
PathDist.scale: 0.0
GoalDist.scale: 24.0
RotateToGoal.scale: 32.0
RotateToGoal.slowing_factor: 5.0
RotateToGoal.lookahead_time: 1.0
In case you require more info to help me don't hesitate to reach me out!
Thank you!
add a comment

