
can Teb navigation finish a shuttle run path?
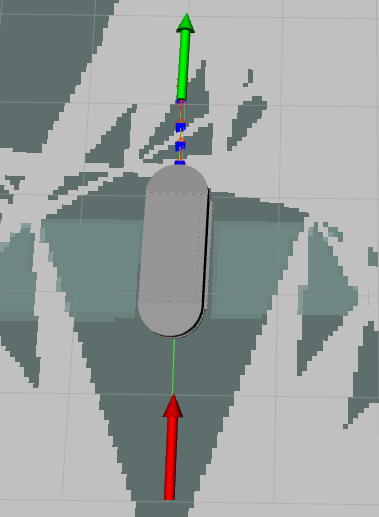
Hi, when doing some works with Teb navigation, I met a problem that Teb seems unable to follow a shuttle run path as image attached.
Description about the process:
- Set up the path by using waypoint_global_point, green arrow: first target, red one: second target.
- when robot running, it got stuck between these two target points.
I think this situation came from that Teb algorithm takes global_plan_lookahead_dist into account,. When robot approaches the first target, global_plan_lookahead_dist includes more parts about "backward path" so that optimization process will ask robot to move backward, making robot stuck.
For this problem, is there any way to solve it ?
Thanks.
add a comment
