
Navsat_transform Parameter configuration
Hi,
I am trying to set the magnetic declination and the yaw offset in navsat transform as required from here and I am still confused looking at the equations mentioned here . I came across this ros question, but I am still trying to understand. Can somebody guide me to understand. So lets see I understand it correctly,
omega (w) - signifies the magnetic declination (the angle between true north and magnetic north)
θ=yaw_imu+ω+offset_yaw
θ- signifies the true yaw value , which we are interested right?
and yaw_imu will mean the measured yaw value from the sensor output ?
and we have to provide (offset_yaw) to navsat transform from the equation ?
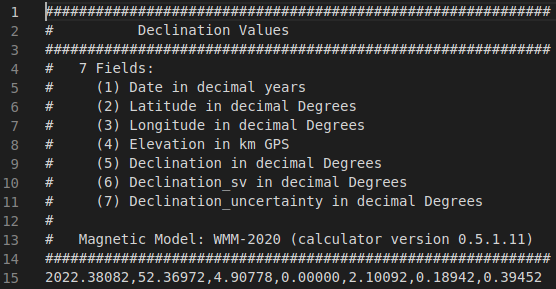
I get the (w) from the link and subsequently converting into radians , I know the yaw_imu from the sensor, should we pass θ value ?If yes, how do I determine its value ?
And also with sign of the magnetic_declination_value , I came across this issue ,does anyone know if it is something to also consider into the calculation ?
Update-1
I am using apps for determining the magnetic north, and regardless of the app I use , my IMU reads a non-zero value when facing magnetic north.
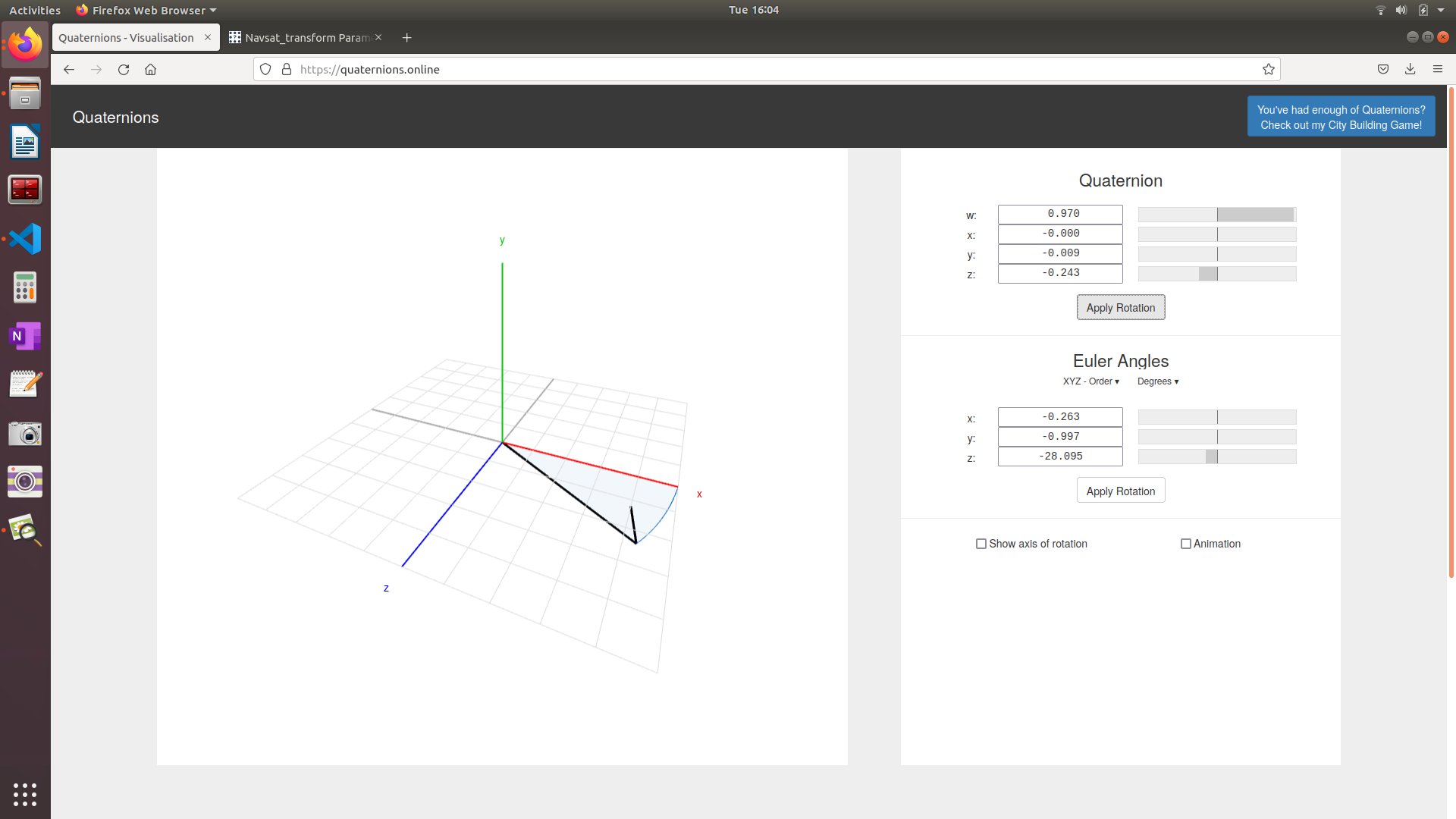
The image depicts the euler angle in degrees which I convert into radians , but regardless how to incorprate this when setting the yaw_offset parameter ?


Just checking to make sure. You are talking about
geometry_msgs/Quaternionand the z values. Are those the z values of the quaternion? Since quaternions cannot be interpreted as x=roll y=pitch z=yaw.Quaternions have 4 parts, x y z and w.
Yes, they are z value from the quaternion
Ok, the z value from the quaternion isn't like the yaw, where the yaw is simply in rads.
I'd suggest googling something about quaternions and perhaps watching some videos (this video might be interesting).
Hi,
@Joe28965 Thanks for pointing out the difference between quaternion and the euler angle. So I will try converting the z value from the quaternion into euler angle and feed it into the navsat transform (yaw_offset) and update here how it goes
So with respect to Update-1, there is still a small degrees difference between the real rotation and as visualized on RVIZ, Can someone point out how to incorporate the point mentioned in the update ?
That website you're using might not give you the best results. It's using Y-up while ROS (and probably your IMU) uses Z-up for the axis.
I have no idea how well that would translate to quaternions.
As for a small degree difference. How small is small? How good is your sensor? If your $10 IMU has an offset of 5 degrees I'd chalk that up to 'cheap sensor'.
Also, what is exactly your question? I'm reading it and our conversation and tbh I'm a bit lost.
Hi
I am using this sensor as my IMU
My question is to how to properly set yaw_offset parameter in navsat_transform.