
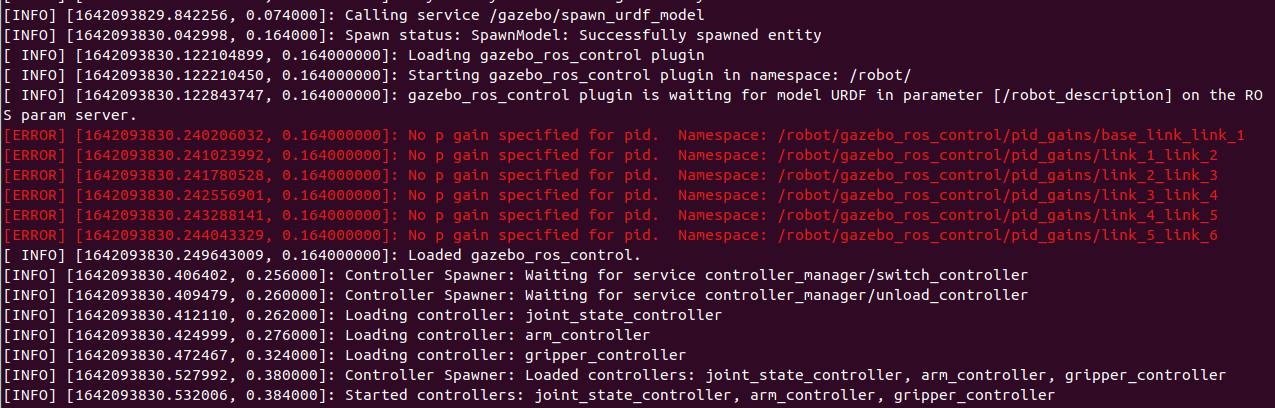
No p gain specified for pid
I have made custom urdf for 6 DOF robot, when I run it it shows this error
I have added ros control to this this is the YAML file
robot: #list of controllers joint_state_controller: type: joint_state_controller/JointStateController publish_rate: 50
arm_controller:
type: "position_controllers/JointTrajectoryController"
joints:
- base_link_link_1
- link_1_link_2
- link_2_link_3
- link_3_link_4
- link_4_link_5
- link_5_link_6
gains:
base_link_link_1: {p: 100, i: 0.01, d: 1}
link_1_link_2: {p: 100, i: 0.01, d: 1}
link_2_link_3: {p: 100, i: 0.01, d: 1}
link_3_link_4: {p: 100, i: 0.01, d: 1}
link_4_link_5: {p: 100, i: 0.01, d: 1}
link_5_link_6: {p: 100, i: 0.01, d: 1}
constraints:
goal_time: 10.0 # Override default
state_publish_rate: 50 # Override default
action_monitor_rate: 30 # Override default
stop_trajectory_duration: 0 # Override default
gripper_controller:
type: "effort_controllers/JointTrajectoryController"
joints:
- gripper_right_joint
- gripper_left_joint
gains:
gripper_right_joint: {p: 100, i: 1, d: 10, i_clamp: 1.0}
gripper_left_joint: {p: 100, i: 1, d: 10, i_clamp: 1.0}
constraints:
goal_time: 3.0
gripper_right_joint:
goal: 0.02
gripper_left_joint:
goal: 0.02
i am used ros noetic
add a comment

