
Unable to Calibrate teb_local_planner for Path Planning [closed]
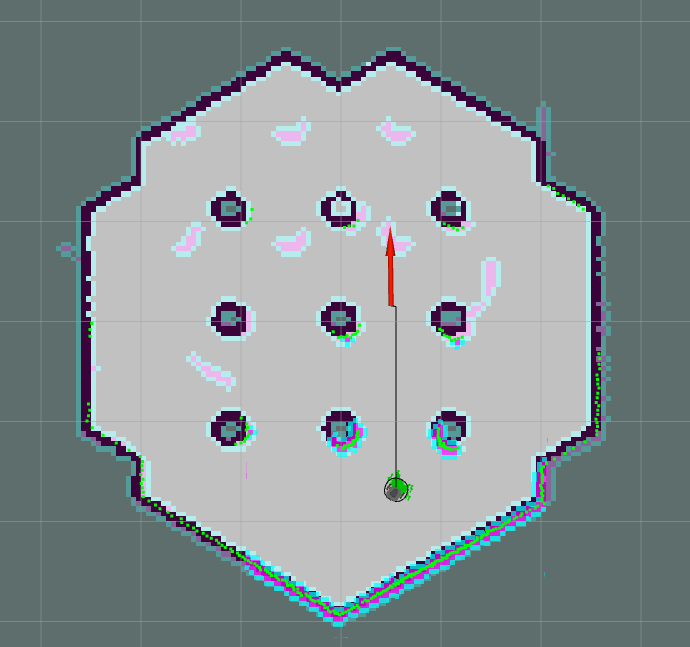
I have been trying to test out the teb_local_planner in place of the DWA_local planner that the ROS navigation stack uses. I'm basicalIy trying to see if teb_local_planner is better for creating paths when there are obstacles involved in certain scenarios. I have been using the Tutorial found in the ROS wiki to figure out how to get it to work (http://wiki.ros.org/teb_local_planner...). I can set goal on rviz and a path is created but the robot is unable to move to them, for instance the robot moves but is unable to get to the goal and behaves like obstacles are in its way so it just moves back and forth. Inother cases the robot reaches the goal but then moves passed it or away from it for some reason. here is a picture of an instance where the robot is unable to complete it's journey: Robot_cant_move_to_goal
I have tried to attach pictures of relevant .launch files and .yaml files which might contain parameters I don't know how to change to fix my issues. Any help would be much appreciated.
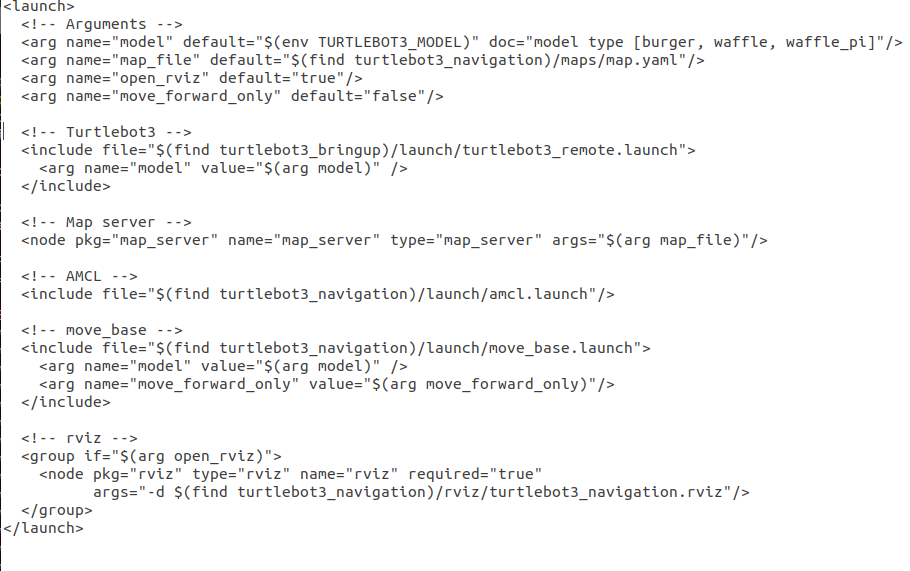
Here is my turtlebot3_navigation.launch file below
<launch>
<!-- Arguments -->
<arg name="model" default="$(env TURTLEBOT3_MODEL)" doc="model type [burger, waffle, waffle_pi]"/>
<arg name="map_file" default="$(find turtlebot3_navigation)/maps/map.yaml"/>
<arg name="open_rviz" default="true"/>
<arg name="move_forward_only" default="false"/>
<!-- Turtlebot3 -->
<include file="$(find turtlebot3_bringup)/launch/turtlebot3_remote.launch">
<arg name="model" value="$(arg model)" />
</include>
<!-- Map server -->
<node pkg="map_server" name="map_server" type="map_server" args="$(arg map_file)"/>
<!-- AMCL -->
<include file="$(find turtlebot3_navigation)/launch/amcl.launch"/>
<!-- move_base -->
<include file="$(find turtlebot3_navigation)/launch/move_base.launch">
<arg name="model" value="$(arg model)" />
<arg name="move_forward_only" value="$(arg move_forward_only)"/>
</include>
<!-- rviz -->
<group if="$(arg open_rviz)">
<node pkg="rviz" type="rviz" name="rviz" required="true"
args="-d $(find turtlebot3_navigation)/rviz/turtlebot3_navigation.rviz"/>
</group>
</launch>
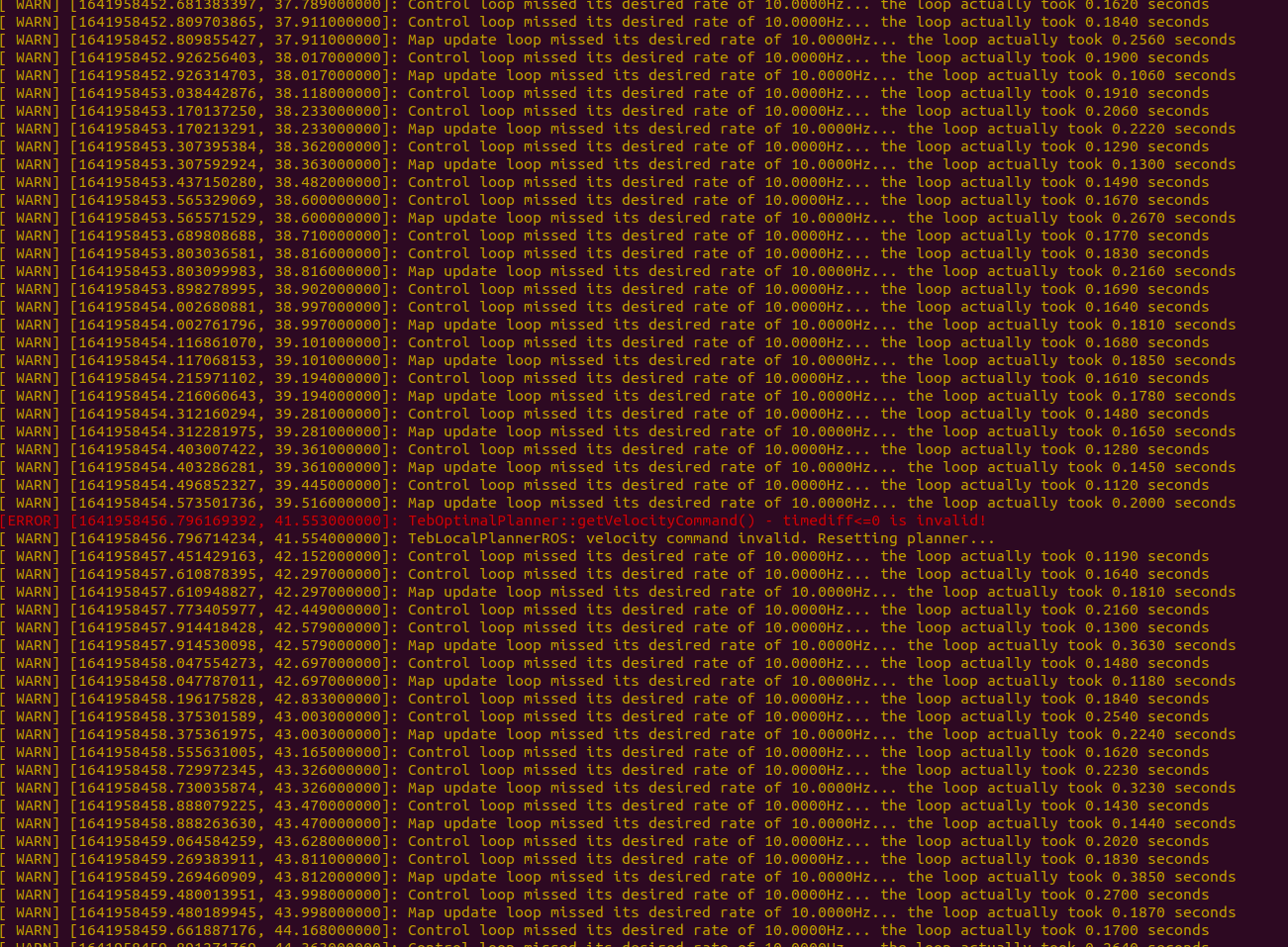
which opens up the rviz when you roslaunch. I get these Warning and error messages in my terminal("TebOptimalPlanner::getVelocityCommand() - timediff<=0 is invalid") here:
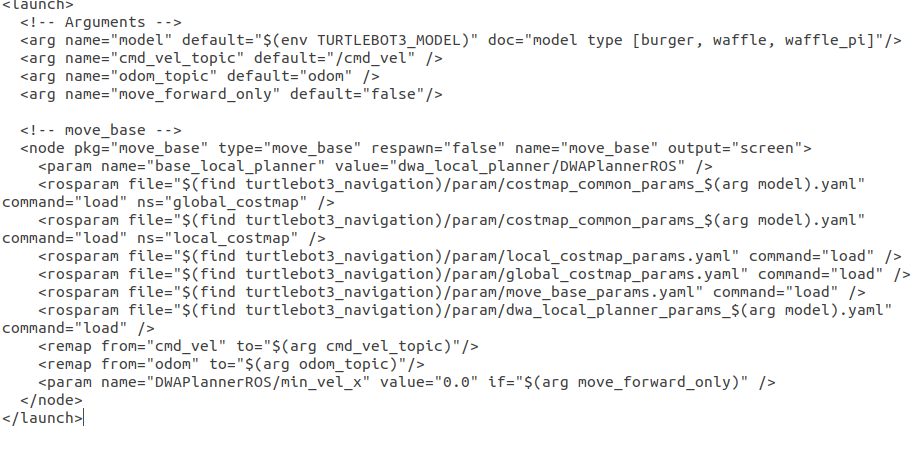
This is my former move_base.launch file which uses the DWA planner-- Former_move_base.launch:
<launch>
<!-- Arguments -->
<arg name="model" default="$(env TURTLEBOT3_MODEL)" doc="model type [burger, waffle, waffle_pi]"/>
<arg name="cmd_vel_topic" default="/cmd_vel" />
<arg name="odom_topic" default="odom" />
<arg name="move_forward_only" default="false"/>
<!-- move_base -->
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
<param name="base_local_planner" value="dwa_local_planner/DWAPlannerROS" />
<rosparam file="$(find turtlebot3_navigation)/param/costmap_common_params_$(arg model).yaml" command="load" ns="global_costmap" />
<rosparam file="$(find turtlebot3_navigation)/param/costmap_common_params_$(arg model).yaml" command="load" ns="local_costmap" />
<rosparam file="$(find turtlebot3_navigation)/param/local_costmap_params.yaml" command="load" />
<rosparam file="$(find turtlebot3_navigation)/param/global_costmap_params.yaml" command="load" />
<rosparam file="$(find turtlebot3_navigation)/param/move_base_params.yaml" command="load" />
<rosparam file="$(find turtlebot3_navigation)/param/dwa_local_planner_params_$(arg model).yaml" command="load" /> ...
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Hi @distro
Instead of using links for pictures, please update your question by copying the text and formatting using 101010 button.
With a brief review of your launch file, I suggest you first start by reviewing this previous question: #q362110
Next you can use the navigation guide for turtlebot3 found here: https://emanual.robotis.com/docs/en/p...
@osilva Thank you, I was able to figure out how to post multiline code and made a new question since I couldn't re-open this one for some reason, it's here