
How to have LiDAR Sensor Data Show More Clearly?

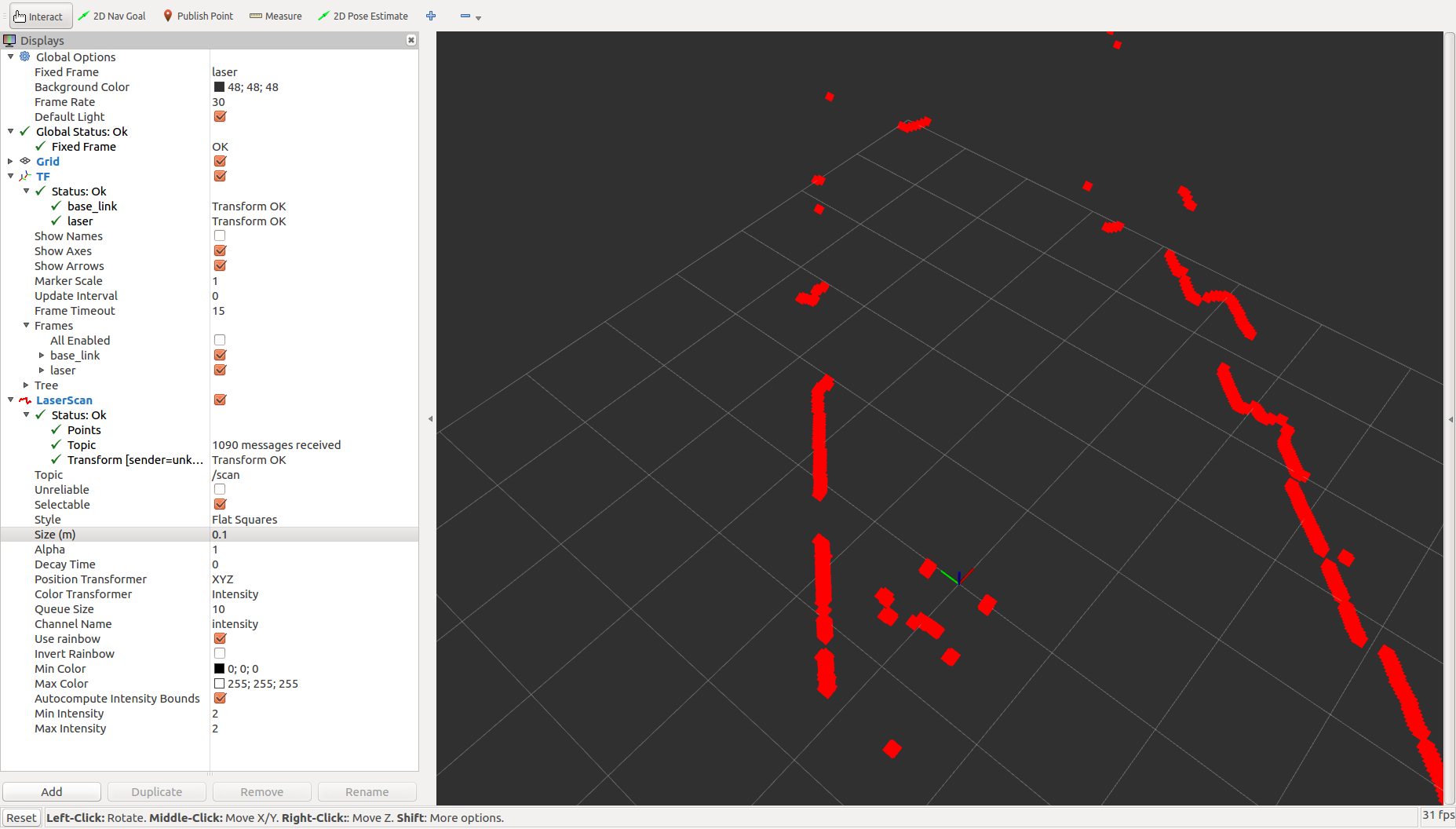
It's my first time using a LiDAR sensor, and when I try to visualize the data(i.e. scan the room), all I get is a few lines. Nothing is defined as I thought it'd be and I'm not sure how to show / get a more clear image of a scanned object. Does anyone know how I can get a defined scan of an object other than 3-5 small lines? Any help is appreciated.
LiDAR Sensor: Hokuyo utm 30lx ROS: Kinetic RVIZ to visualize the scanned data.
add a comment


{kind=link}