How can I find the appropriate robot footprint?
Hello all, I'm starting out in ROS and trying to set up my nav stack correctly. I'm trying to figure out on how to specify my robot's footprint and request some help. Thank you :D
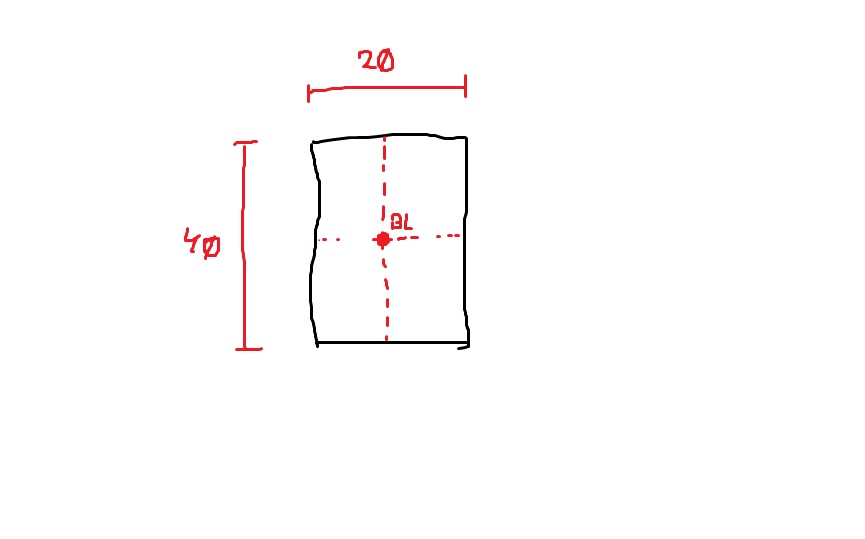
add a comment