
The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| | 1 | initial version |
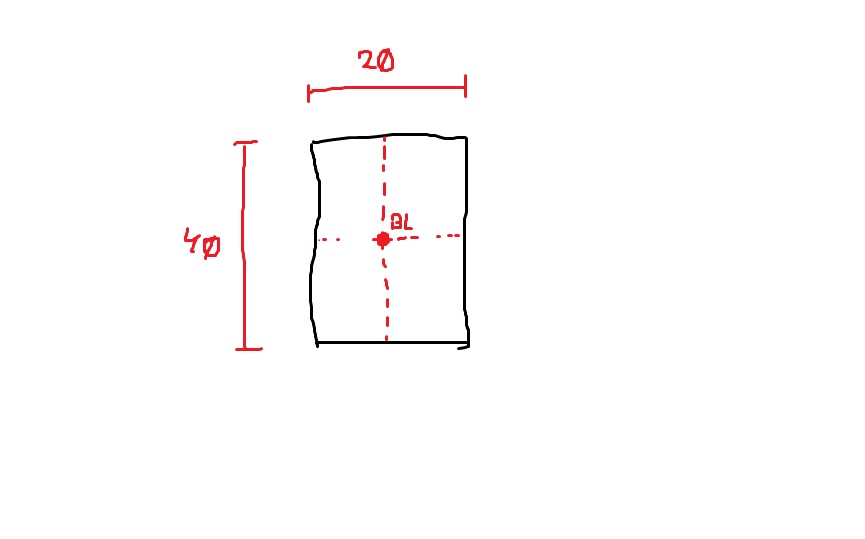
If you want to set up the footprint of a "non-comercial" robot (DIY) you should write down the coordinates on the common costmaps yaml. I have a rectangular sized robot with the base_link frame at the center of that rectangle, so I have 4 coordinates written in counterclockwise direction. So, for example, if I have something like this:
My footprint should be: [[-10, -20], [10, -20], [10, 20], [-10,20]].
Hope this can help you!
| | 2 | No.2 Revision |
If you want to set up the footprint of a "non-comercial" robot (DIY) you should write down the coordinates on the common costmaps yaml.
I have a rectangular sized robot with the base_link frame at the center of that rectangle, so I have 4 coordinates written in counterclockwise direction.
So, for example, if I have something like this:this:
My footprint should be: [[-10, -20], [10, -20], [10, 20], [-10,20]].
Hope this can help you!
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.