
rqt joint trajectory controller crashes with division by zero error
Hi,
I have a custom 4 degree of freedom basic manipulator which I made for my own learning. I followed this video to add the controllers and launch files for my robot. Then I run rosrun rqt_joint_trajectory_controller rqt_joint_trajectory_controller. I am able to see the following pic
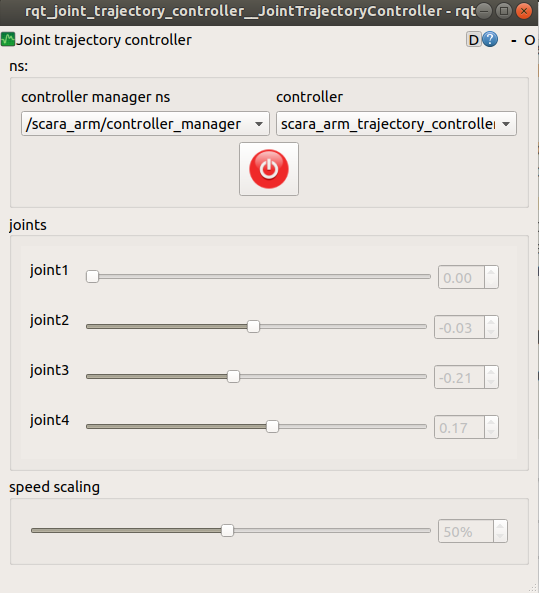
But as soon as I press the red button, I get the error
Traceback (most recent call last):
File "/opt/ros/melodic/lib/python2.7/dist-packages/rqt_joint_trajectory_controller/joint_trajectory_controller.py", line 427, in _update_cmd_cb
dur.append(max(abs(cmd - pos) / max_vel, self._min_traj_dur))
ZeroDivisionError: float division by zero
I am on Ubuntu 18.04, ROS Melodic
Pls help Thanks

Faced the same issue. Did you find any solution?
In my case I used zero for the velocity values in my urdf. Setting max velocity values of all the joints to something velocity=50 and efforts=1000 worked fine for me. If you notice the what the error says you'll see
abs(cmd - pos) / max_velis the part where the error is happening.