
Warning: Invalid frame ID question for rviz2 (ROS2) [closed]
Question,
I seem I couldn't find any information, tutorial, or anything related to non-odom topic. odom is obviously different from wheel, a simple joint or anything that requires an integer value (or type of value)
So in my case, one joint called head which is (clipped head part only)
<link name ="head">
<visual>
<geometry>
<cylinder radius="0.01" length="0.02"/>
</geometry>
<material name="white"/>
</visual>
<collision>
<geometry>
<cylinder radius="0.01" length="0.02"/>
</geometry>
</collision>
<xacro:cylinder_inertia m="1" r="0.01" h="0.02"/>
</link>
The result is this
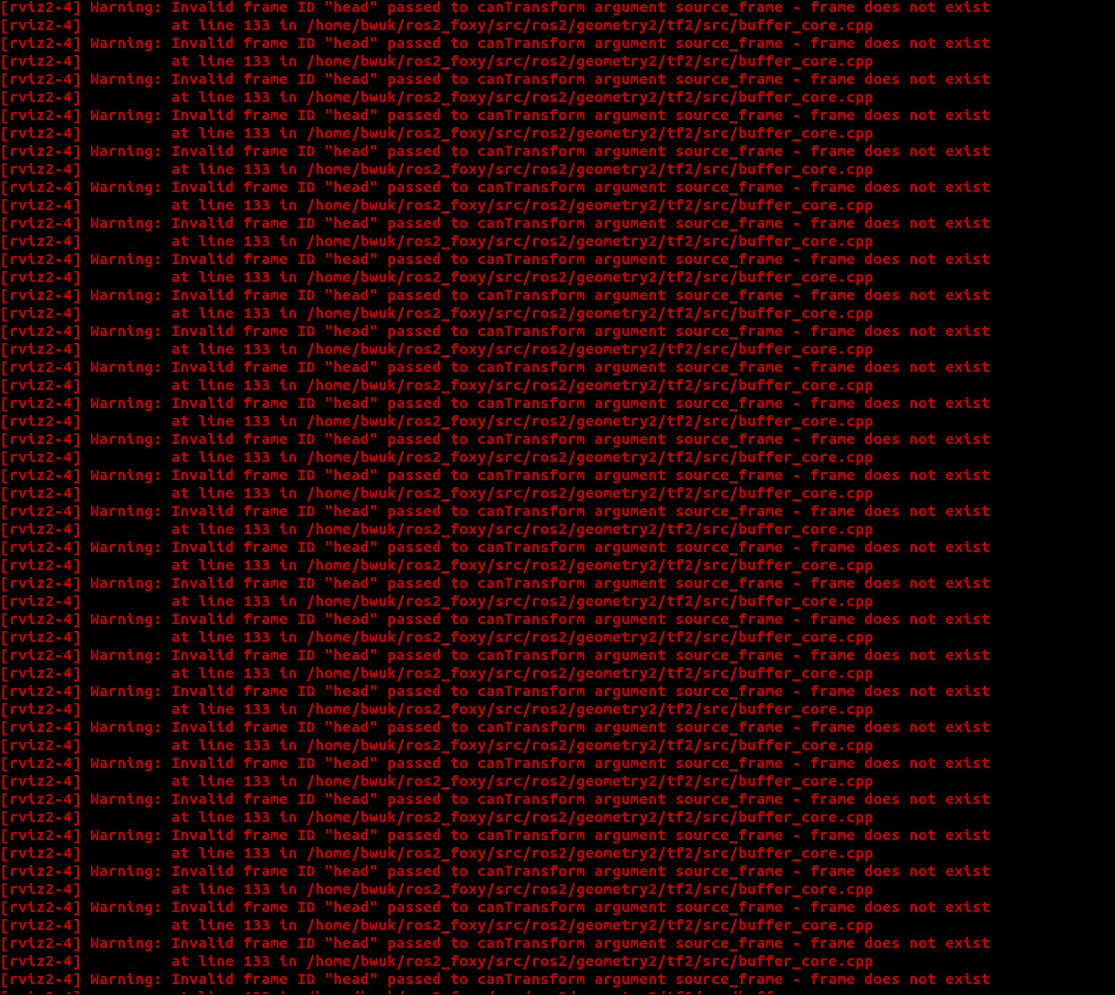
So the question, for me or anyone else who approached to the same issue, is how do we correct it in a right way?
Let's say, if someone else made a joint called wheel, hand, or something simple (in my case, it's head)
What should we do to correct the issue? Do we need to update the launch? If so, which and what should we put?
Thank you for your time and efforts
Closed for the following reason
too subjective or argumentative by
kak13
close date 2021-08-27 00:14:13.426609
add a comment
