
lider see through wall
when i start gmapping with lider it see through wall
there is a wall behind it it shows a gap which really messes up the map
add a comment
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
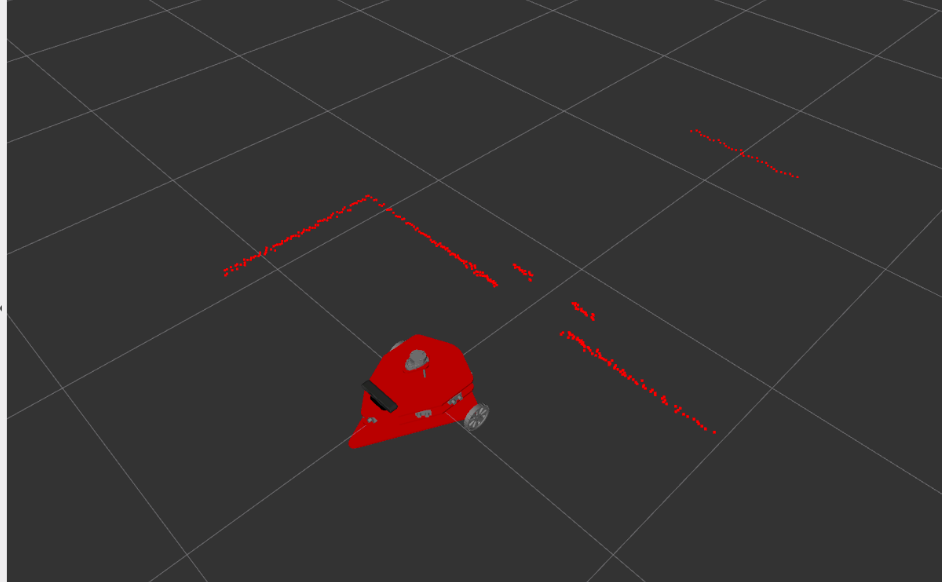
when i start gmapping with lider it see through wall
there is a wall behind it it shows a gap which really messes up the map
i got the solution i just have to replace this
replace
<sensor type="gpu_ray" name="head_hokuyo_sensor">
with
<sensor type="ray" name="head_hokuyo_sensor">
and replace
<plugin name="gazebo_ros_head_hokuyo_controller" filename="libgazebo_ros_gpu_laser.so">
with
<plugin name="gazebo_ros_head_hokuyo_controller" filename="libgazebo_ros_laser.so">
Asked: 2021-06-03 08:50:22 -0500
Seen: 76 times
Last updated: Jun 03 '21
How can I use a .URDF sensor on a .SDF robot on ROS and Gazebo?
Turtlebot3 description not found.
Arduino rosserial - Long action results in: lost sync with device
Delay when subscribing to usb_cam/image_raw
how to install mongodb for ros noetic
Is it possible to run ros only with binaries
Frames are moving away from global frame
How do I make gmapping work with CoppeliaSim
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.