
Astra Pro Callibration
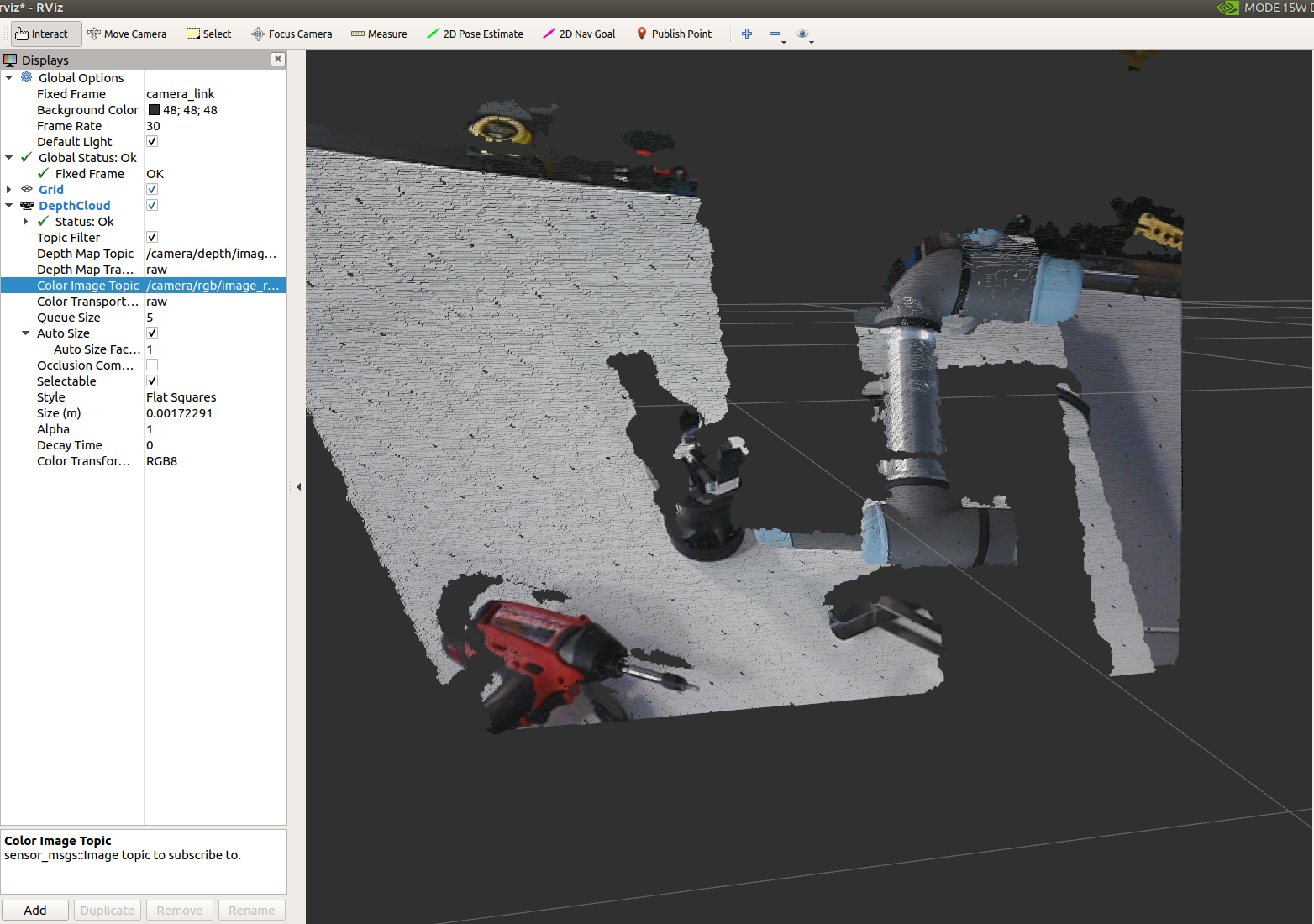
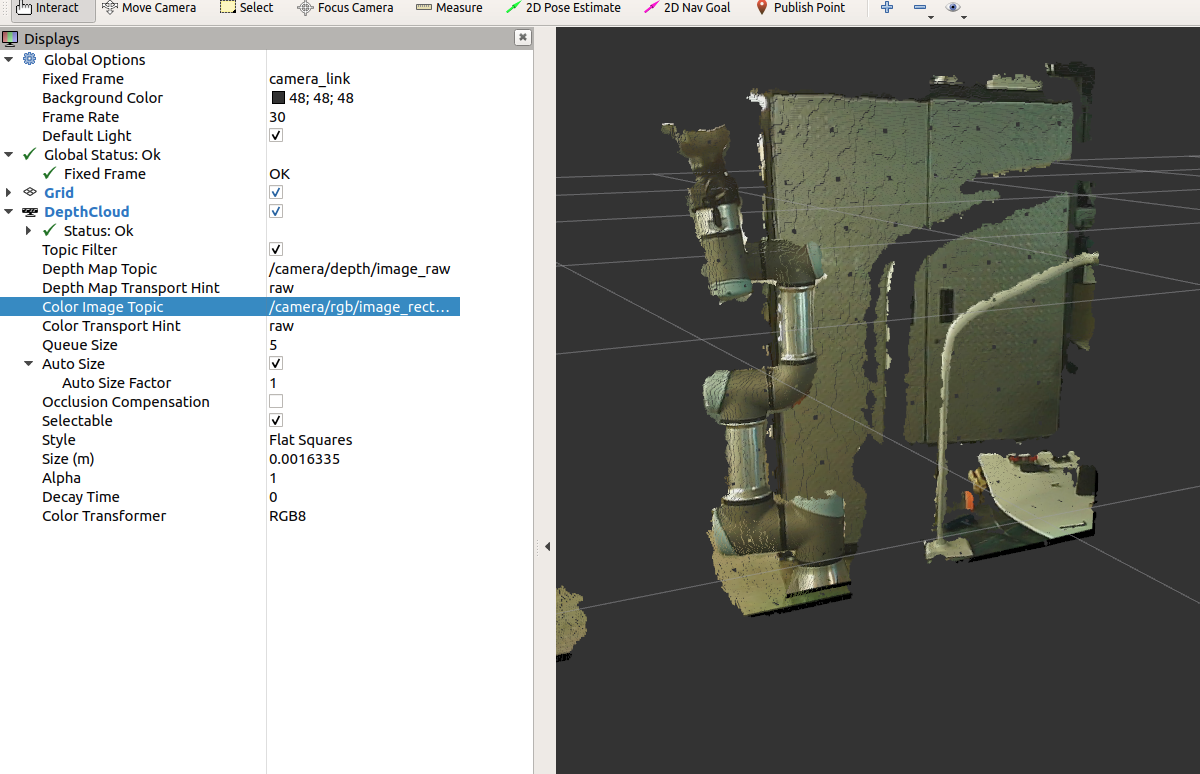
My depth and image topics are not aligning very well. I am using the astra_camera package. I attempted to solve the issue by callibrating the RGB image with camera_callibration. Unfortunately, that didn't seem to help. Is there some other callibration or something I need to do to improve the alignment?
roslaunch astra_camera astrapro.launch
depth topic: /camera/depth/image_rect
rgb topic: /camera/rgbd/image_rect_color

Doesn't
camera_calibrationonly calibrate camera intrinsics? Your RGB and IR cameras are essentially two different sensors. That would be an extrinsic calibration.I'd suggest to first make sure the camera OEM doesn't have any tools for this. They typically do.
"Doesn't camera_calibration only calibrate camera intrinsics." Yes, but thought it may still be the source of the error.
From what I understand, extrinsic calibration accounts for the relative position of the two sensors, right? I am using a launch file specific to the Astra Pro, so I assumed that would be accounted for within the ROS package.
Orbbec (the OEM) does offer an SDK, I will look into it and update here if I find a solution.
could indeed be the case.
That would be something to check. It depends on which entity is responsible for publishing the relevant TF frames. The driver would be one good candidate.
you could also ask them whether what you see is abnormal. Some disparity between the RGB and depth images is not uncommon.