
Navigation 2: can't reach the goal pose
I'm using Navigation with ROS 2 (Foxy) and I have a strange issue when the robot can't quite reach the goal pose.
It starts fine, follows the path, but stops too early before the goal and then tries spin recovery multiple times until it fails.
Here is the picture of the final state:
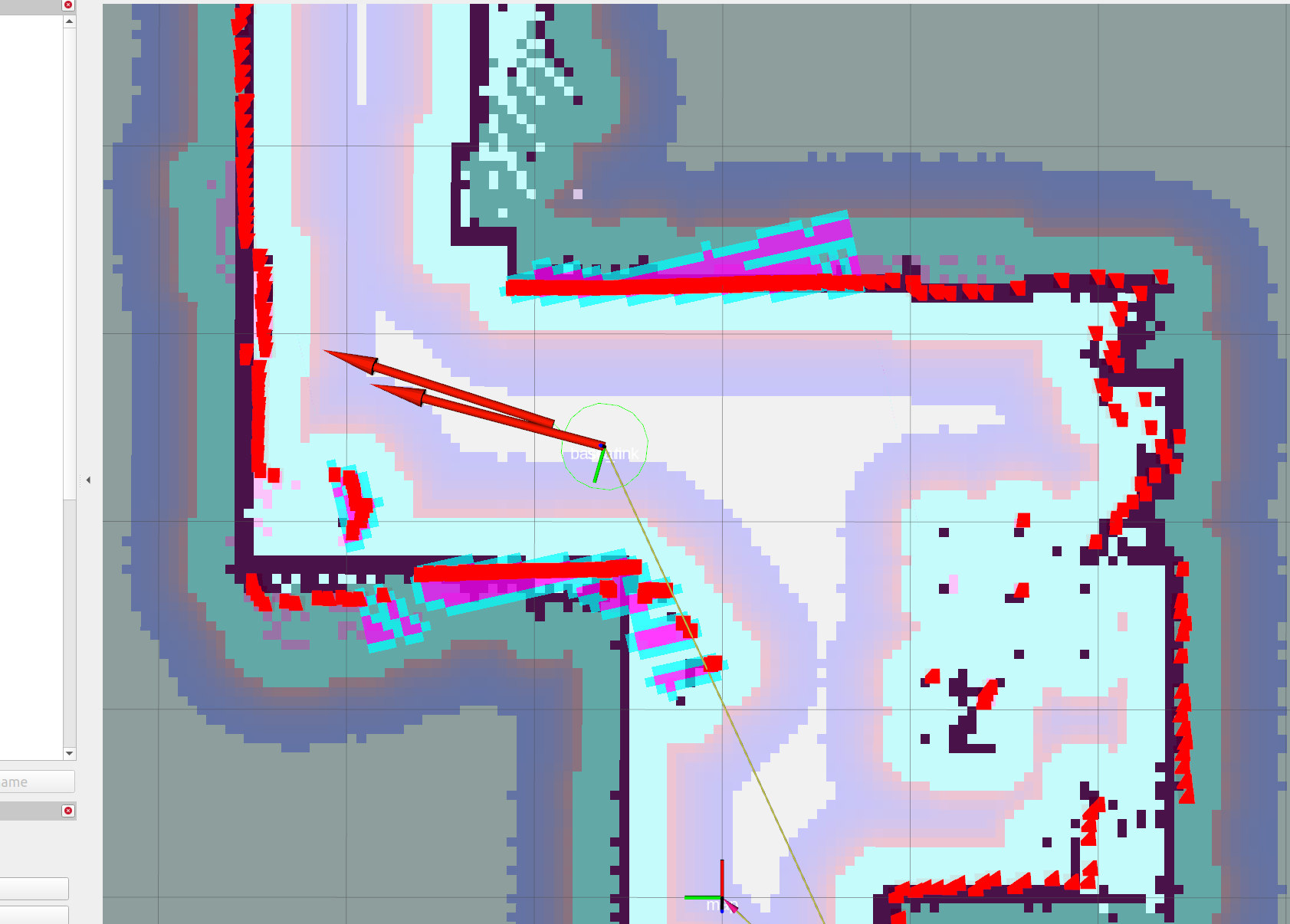
As you can see there is still a little bit to go until the goal is reached, but it stops and then tries to adjust the angle too early. After it fails to match the angle it tries spin recovery a couple of times.
Here is the video of what is happening: https://www.youtube.com/watch?v=OCGBV...
Why doesn't it go all the way until the goal pose? As the map in RViz shows the system clearly knows that base_link is not yet in position so it should have kept going before attempting to match the angle.
Odometry seems fine because I'm using stepper motors and they are very precise. It corresponds to where the robot is in the room. The odometry arrow in RViz also points in the same direction where the robot is.
Which navigation parameters should I look at? What could explain this behaviour?
Cheers, Leonti
