
tuning robot_localization parameters
Hi, I would like to receive some advice about my robot localization setup and configuration parameters. I have a working repo for reproduce my results: https://gitlab.com/elgarbe/rl_yaguaro...
The hardware is a icm20602 IMU with a HMC5883 magnetometer connected to a custom made low level computer (STM32F722). This is connected to a raspberry pi through a serial connection. I'm using rosserial for the ROS communication between the computers. There are two GPS, a M8N and a F9P (ardusimple with RTK corrections), connected to raspberry. M8N use nmea_navsat_driver and F9P ublox ros driver from kummar robotics.
So I have follow topics:
/m8n/fix
/f9p/ublox/fix
/chori/imu/data_raw : This is gyro, accel and orientation obtained just from magnetometer on low level computer
/chori/imu/mag : hard iron corrected ,agnetometer readings
/chori/imu/mag_raw : un-corrected magnetometer readings
I have launch file, localize.launch, that runs all the nodes involved in RL, including rosbag and rviz. There is two main bagfiles (both terminated with _ on the name). The one from 180521 is with RTK corrections on f9p/fix and 230521_ don't have corrections.
The idea is to tune RL parameters with IMU and m8n GPS and compare it with "ground truth" provided by f9p (with rtk corrections). Finally I have imu_madwick filter configured so there is a /imu/data topic with orientation obtained from gyro, accel and mag readings. I have several problems, but right now I think I have some interesting results.
When I use m8n GPS and madgwick filter I obtain very bad results. In the first seconds (the imu is stationary on a table) I'v notice that position estimate drift a lot between 2 GPS readings:
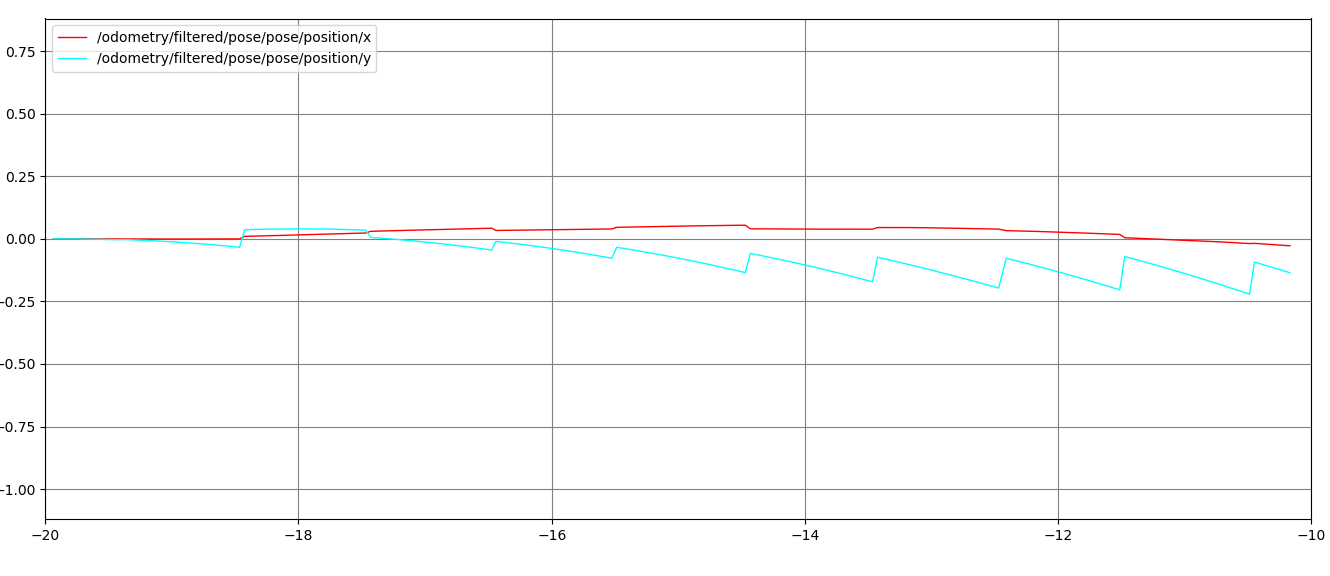
is this normal? I'm expecting less movement here.
Then, as I start moving, the position estimate between 2 gps signal seems to be not aligned with the movement:
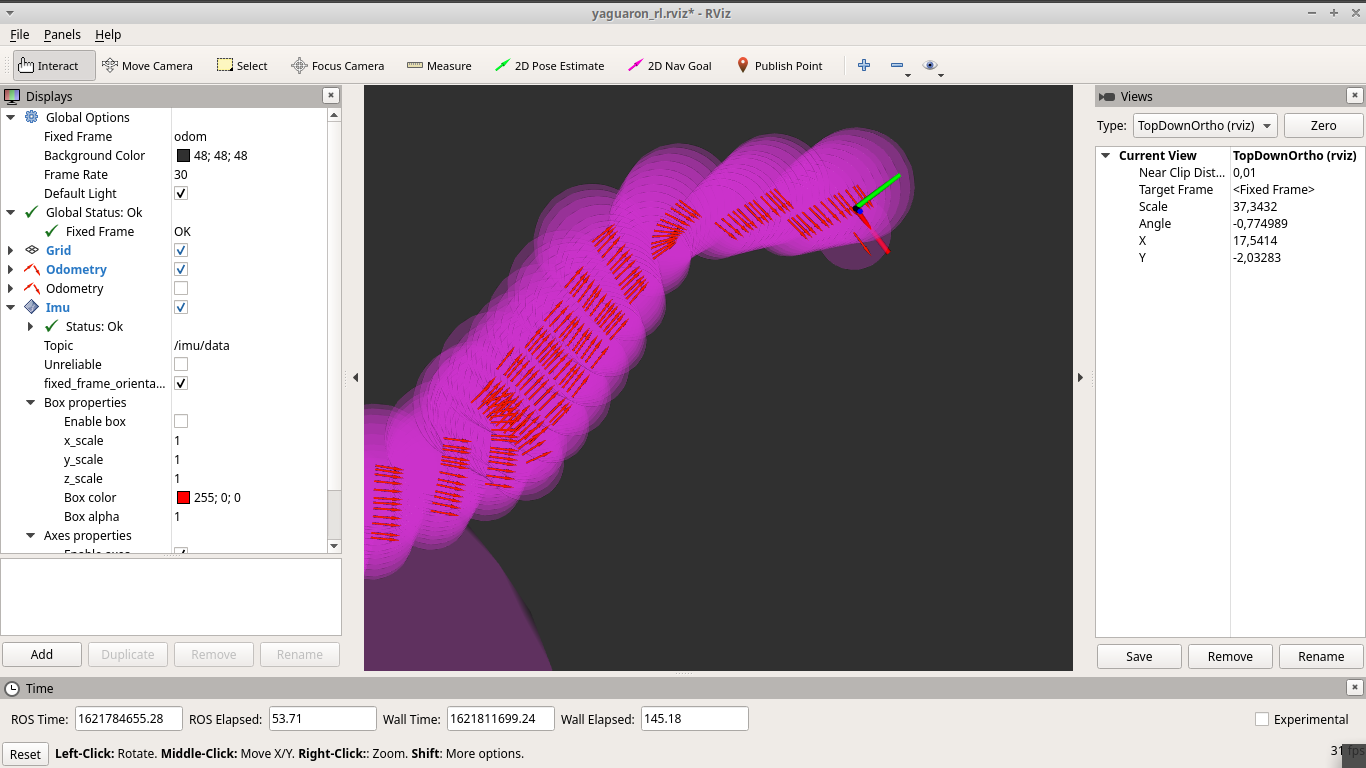
RL orientation is aligned with the orientation from the output of the madwick filter.
Then I remove the use of magnetometer on madgwick filter and things get better:
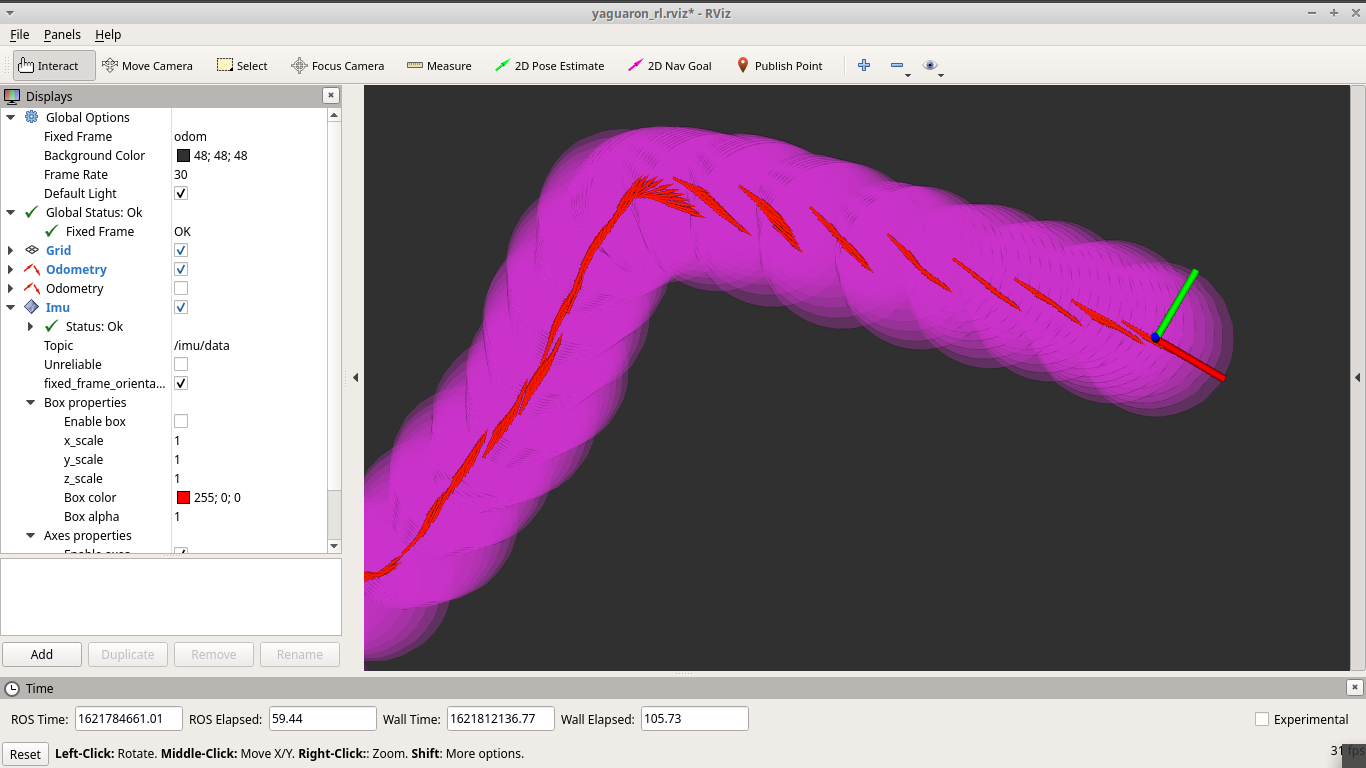
but not perfect... what bother me is that madgwick filter ouput with magnetometer activated seems to work fine witout RL. It gives 0 when facing EAST and 90º facing NORTH. So, I'm not sure why get worse result using it.
Can some one gives some advise? I think that anyone can reproduce my results cloning my repo.
Thank
