
Connect SVL simulator (desktop) to AutowareAI running in other machine [closed]

Hi
My laptop does not support SVL simulator and AutowareAI AD stack running on the same machine due GPS features...
For this reason I need to run the SVL simulator on a desktop located in another city, and run the AutowareAI AD stack on my laptop at home. Therefore I do not have the possibility to connect my notebook and the desktop physically using cables in the same network.
I know from the documentation to set a ROSbridge for a local machine: "localhost:9090:
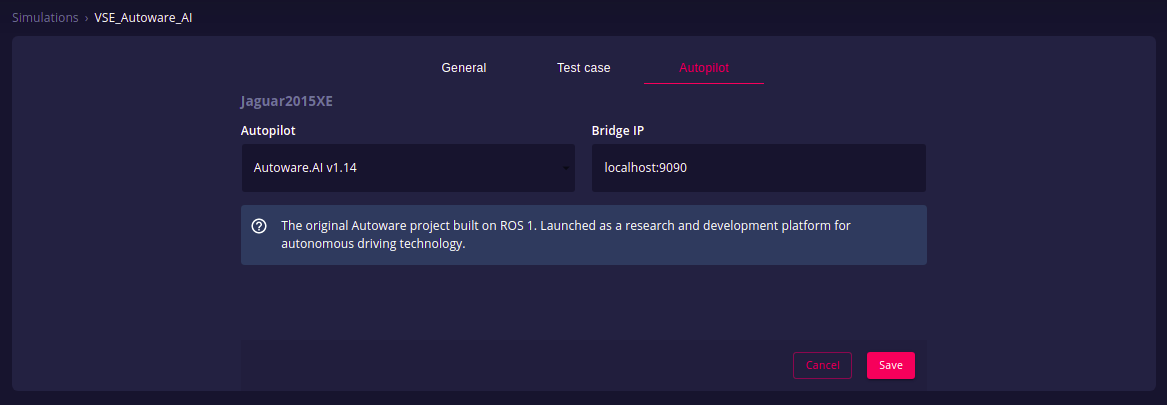
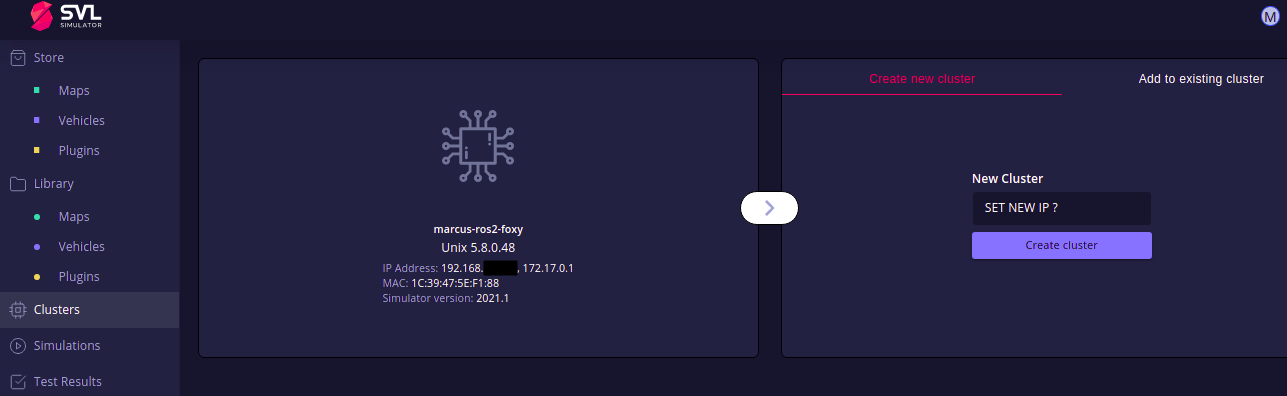
But to connect to this desktop in other location far from my laptop. How to set the ip address? Is it just to identify my notebook ip address and put it on "Bridge IP" tab (with the simulator opened in desktop) ? In the image case my Laptop private IP is below ( The last numbers are hidden by a black box and substituted for X.X for security reasons, and the second number after comma "172.17.0.1 I really do not know what is referred to ??? )
In my case add :192.168.X.X, 172.17.0.1 ( insert on space of "Bridge IP" tab - which is displayed on first image uploaded here)
Would this be enough to establish the SVL simulator (on desktop) to AutowareAI (on laptop) ? Or is it really necessary a physic connection between my laptop and the desktop?
If someone has already done this and could send me a step-by-step tutorial I will be very grateful
Thanks in advance
