
robot loaded in different positions in Gazebo and Rviz
Hi
I loaded an image for Willow Garage in Rviz, and a world for Willow Garage in Gazebo. My rosbot2 is loaded in the default position which is the origin. However, my rosbot2 was loaded in different positions in map and world.
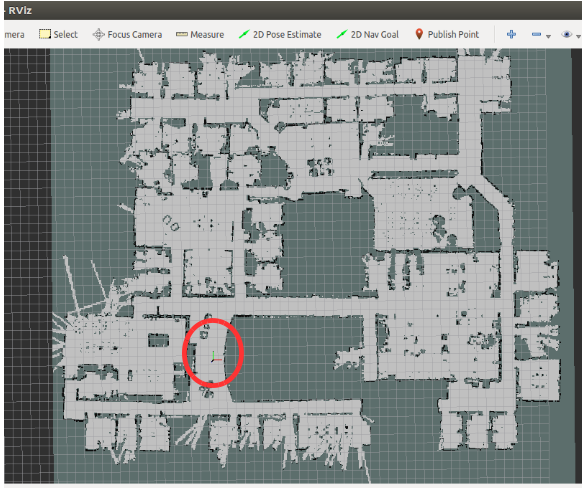
Here is rosbot2 in Rviz(inside the red circle):
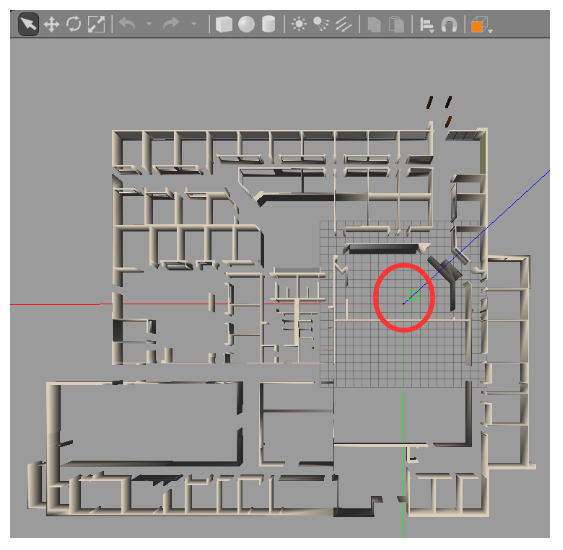
Here is rosbot2 in Gazebo(inside the red circle):
Here are my files: willow_garage_map.yaml
image: willow_garage_map.pgm
# a 584 X 526 map @ 0.100 m/cell
resolution: 0.1
origin: [-18, -15, 0.0]
occupied_thresh: 0.65
free_thresh: 0.196
negate: 0
move_my_rosbot.launch
<launch>
<arg name="use_rosbot" default="false"/>
<arg name="use_gazebo" default="true"/>
<param if="$(arg use_gazebo)" name="use_sim_time" value="true"/>
<include file="$(find rosbot_description)/launch/rosbot_rviz.launch"/>
<arg name="map_file" default="$(find rosbot_navigation)/maps/willow_garage_map.yaml"/>
<node name="map_server" pkg="map_server" type="map_server" args="$(arg map_file)" />
<node unless="$(arg use_rosbot)" pkg="tf" type="static_transform_publisher" name="map_odom_tf" args="0 0 0 0 0 0 map odom 100" />
<node pkg="move_base" type="move_base" name="move_base" output="screen">
<param name="base_global_planner" value="navfn/NavfnROS"/>
<param name="base_local_planner" value="base_local_planner/TrajectoryPlannerROS"/>
<param name="controller_frequency" value="10.0"/>
<rosparam file="$(find rosbot_navigation)/config/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find rosbot_navigation)/config/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find rosbot_navigation)/config/local_costmap_params.yaml" command="load" />
<rosparam file="$(find rosbot_navigation)/config/global_costmap_params.yaml" command="load" />
<rosparam file="$(find rosbot_navigation)/config/trajectory_planner.yaml" command="load" />
</node>
</launch>
costmap_common_params.yaml
obstacle_range: 6.0
raytrace_range: 8.5
footprint: [[0.12, 0.14], [0.12, -0.14], [-0.12, -0.14], [-0.12, 0.14]]
map_topic: /map
subscribe_to_updates: true
observation_sources: laser_scan_sensor
laser_scan_sensor: {sensor_frame: laser, data_type: LaserScan, topic: scan, marking: true, clearing: true}
global_frame: map
robot_base_frame: base_link
always_send_full_costmap: true
global_costmap_params.yaml
global_costmap:
global_frame: map
update_frequency: 0.5
publish_frequency: 1.5
transform_tolerance: 1.0
width: 16
height: 16
origin_x: -8
origin_y: -8
static_map: true
rolling_window: true
inflation_radius: 0.0
cost_scaling_factor: 10.0
resolution: 0.01
local_costmap_params.yaml
local_costmap:
global_frame: map
update_frequency: 2.5
publish_frequency: 2.5
transform_tolerance: 1.0
static_map: false
rolling_window: true
width: 3
height: 3
origin_x: -1.5
origin_y: -1.5
resolution: 0.01
inflation_radius: 0.0
cost_scaling_factor: 10.0
trajectory_planner.yaml
TrajectoryPlannerROS:
max_vel_x: 0.5
min_vel_x: 0.1
max_vel_theta: 2.5
min_vel_theta: -2.5
min_in_place_vel_theta: 0.5
acc_lim_theta: 1.0
acc_lim_x: 1.5
acc_lim_Y: 1.5
holonomic_robot: false
meter_scoring: true
xy_goal_tolerance: 0.5
yaw_goal_tolerance: 0.5
vx_samples: 6
vtheta_samples: 20
controller_frequency: 0.5
occdist_scale: 0.01
pdist_scale: 0.4
gdist_scale: 0.2
dwa: true
These are map and world files:https://www.mediafire.com/folder/q5xt...
Update:
Thanks So Young for your help.
I have tried using different pgm file, and it is better than the pgm above. Using the new pgm, the difference in rosbot2 position at Gazebo and Rviz (world and .pgm map) is not a big difference. However, it still not the same exact position. Should I use ACML ...

By "using different pgm" , do you mean you changed the
originin your map.yaml file? I'm not quite familiar with Gazebo, but when I try to locate my robot on the Rviz (to real robot's position), I use2D pose estimate(on the Rviz top tool bar with green arrow) to click on the approximate position on the map and then use AMCL to locate the robot (usually by rotating in position, the AMCL will be able to locate the robot). And yes, if you want to use AMCL, you should have tf that connects 'map to odom' and 'odom to robot"