How do I change the topic that rqt_robot_monitor subscribes to?
I'm trying to use the rqt_robot_monitor package. The tutorial page claims that:
"The robot_monitor package provides the Robot Monitor GUI that displays the aggregated diagnostics from a robot. The Robot Monitor subscribes to the /diagnostics_agg topic, which is published by the diagnostic_aggregator."
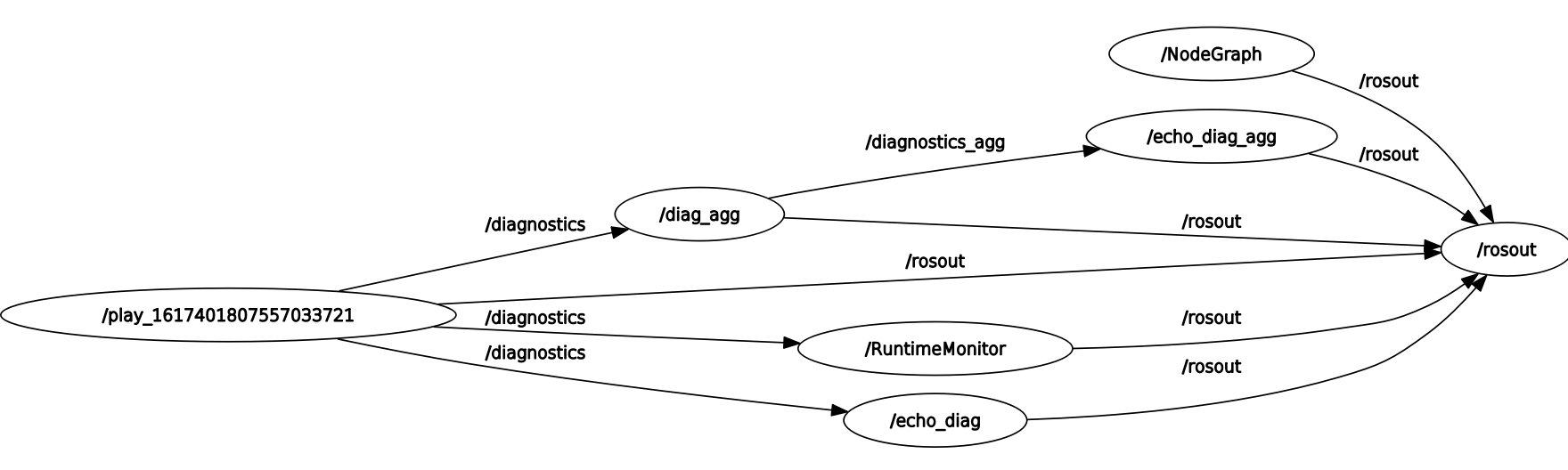
However, as shown by my rqt_plot (picture attached), it appears that rqt_robot_monitor (which I've labled /RuntimeMonitor) does not subscribe to /diagnostics_agg (which is the data aggregated/filtered by my diagnostic_aggregator). It instead subscribes directly to the raw diagnostics data (/diagnostics).
All I need to do is get the rqt_robot_monitor to subscribe to /diagnostics_agg, but I can't figure out where in the code to do that.image description