
What topics does turtlebot3 subscribes to?
I have finally been able to install Gazebo turtlebot3 inside a docker container and being able to run it (Before I could not manage to make it appear visually) .
So I did
roslaunch turtlebot3_gazebo turtlebot3_world.launch
and got
[ INFO] [1615086003.547659406]: Finished loading Gazebo ROS API Plugin.
[ INFO] [1615086003.548824129]: waitForService: Service [/gazebo/set_physics_properties] has not been advertised, waiting...
process[gazebo_gui-2]: started with pid [13657]
[ INFO] [1615086003.928078055]: Finished loading Gazebo ROS API Plugin.
[ INFO] [1615086003.929286898]: waitForService: Service [/gazebo_gui/set_physics_properties] has not been advertised, waiting...
process[spawn_urdf-3]: started with pid [13723]
the rosdep view is empty: call 'sudo rosdep init' and 'rosdep update'
[ INFO] [1615086004.753708994]: waitForService: Service [/gazebo/set_physics_properties] is now available.
[ INFO] [1615086004.775980460, 0.010000000]: Physics dynamic reconfigure ready.
[spawn_urdf-3] process has finished cleanly
log file: /root/.ros/log/392501bc-7ea0-11eb-9515-0242ac110003/spawn_urdf-3*.log
and then from another terminal and inside the same container I did
roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch
However, after that no matter what I press, the robot does not seem to move.
Yet from another terminal I call rqt_graph and got
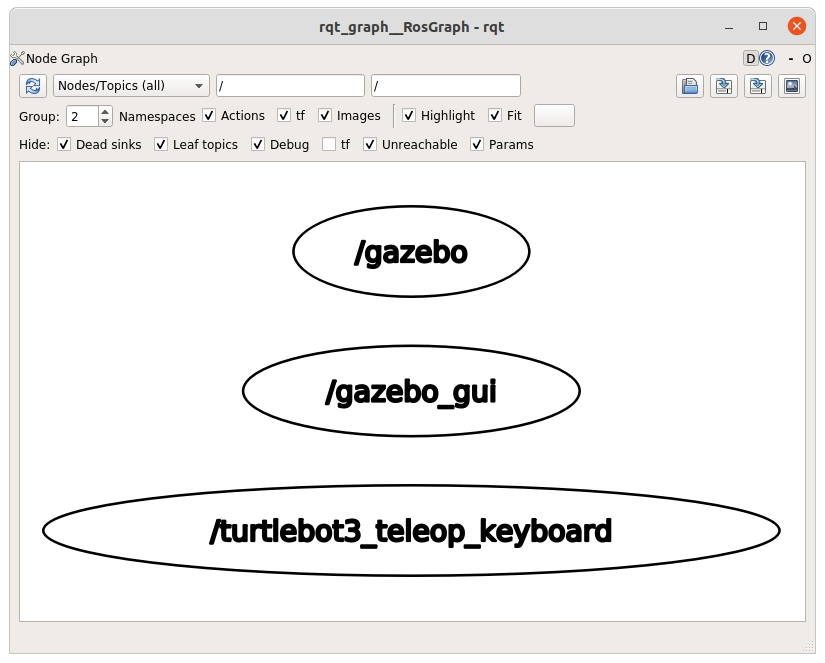
It seems these nodes are not linked together. This is my first time using turtlebot3 and I wonder what topics is turtlebot3 subscribed to and to which topics I should publish in order for the robot to move. I wonder if my installation is working well or if anything is wrong.
By the way I did rostopic lists and got
/clock /cmd_vel /gazebo/link_states
/gazebo/model_states
/gazebo/parameter_descriptions
/gazebo/parameter_updates
/gazebo/set_link_state
/gazebo/set_model_state /rosout
/rosout_agg
and rosnode list
/gazebo
/gazebo_gui
/rosout
/turtlebot3_teleop_keyboard
