
What does "ACCEPTED" and "CANCELING" states do in the ros2 action state machine?
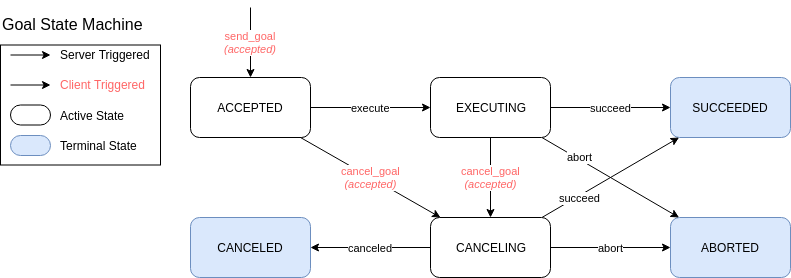
From the figure above, when exactly does the used-defined functions (handle_goal, handle_cancel, and handle_accepted) passed to the create_server function get called?
What I understand from the document is that: once we return rclcpp_action::GoalResponse::ACCEPT_AND_EXECUTE from the handle_goal (passed to the create_server), then at some point, the handle_accepted function will get called and we can perform the task inside the handle_accepted function.
But for cancelling the action, I am a little bit confused reading the document. From the document, it is written that:
- CANCELING - The client has requested that the goal be canceled and the action server has accepted the cancel request. This state is useful for any user-defined “clean up” that the action server may have to do.
But once we return rclcpp_action::CancelResponse::ACCEPT in the function handle_cancel (passed to the create_server), what happen and what does the "CANCELING" state in the figure do? Where should we define the user-defined "clean up" function?


Just a note, please DO NOT cross post ROS answers questions to ROS Discourse.
@kscottz Sorry, I posted on ROS Discourse first and I realized I should post here. Will remove my post on ROS Discourse.