
Give a hand-eye robot series of task
Hello everyone,
I want to give my robot a series of tasks. From this image, I want my robot to calculate the coordinates and then select first back left cow teat, back right teat, then front left and front right teat:
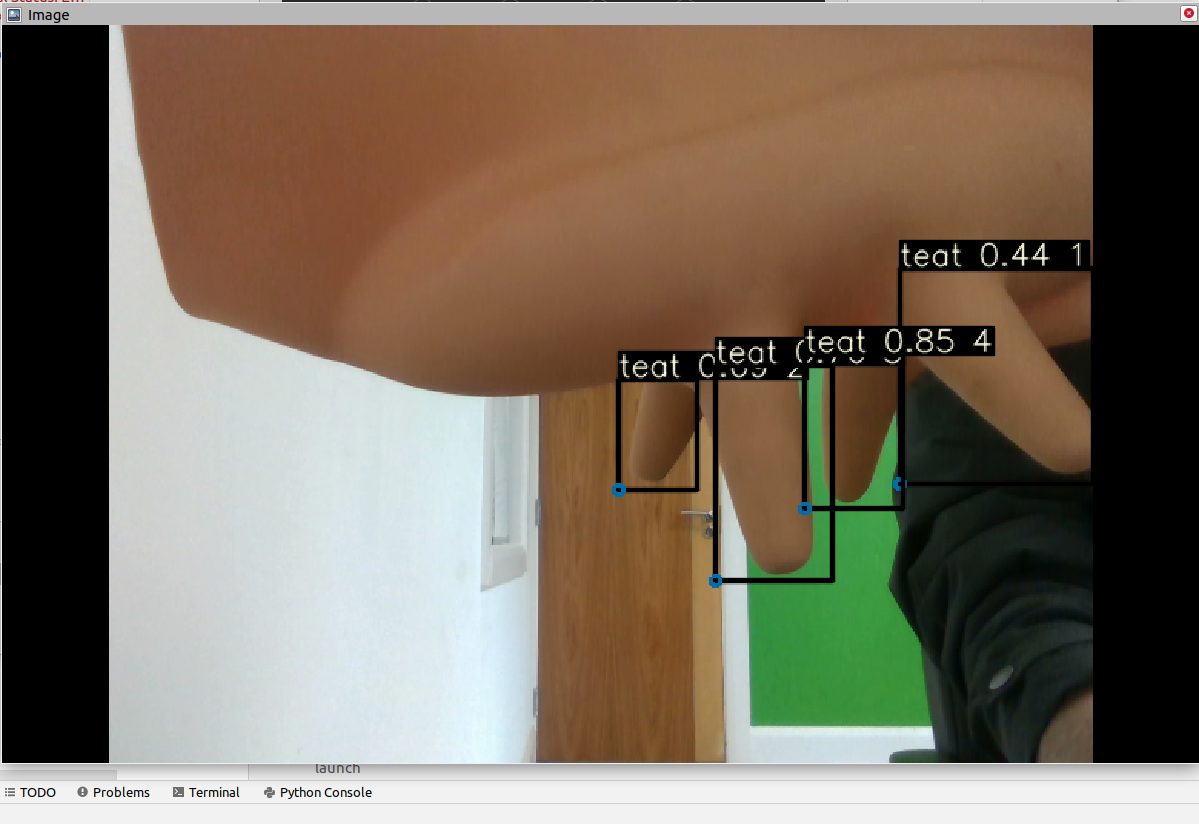
My main task is to grab a cup from a fixed coordinate and attach it to the cow teat based on the given sequence. I am getting the world(3D){link} coordinate for the detected object, and based on that, I want to move the hand-eye robot.
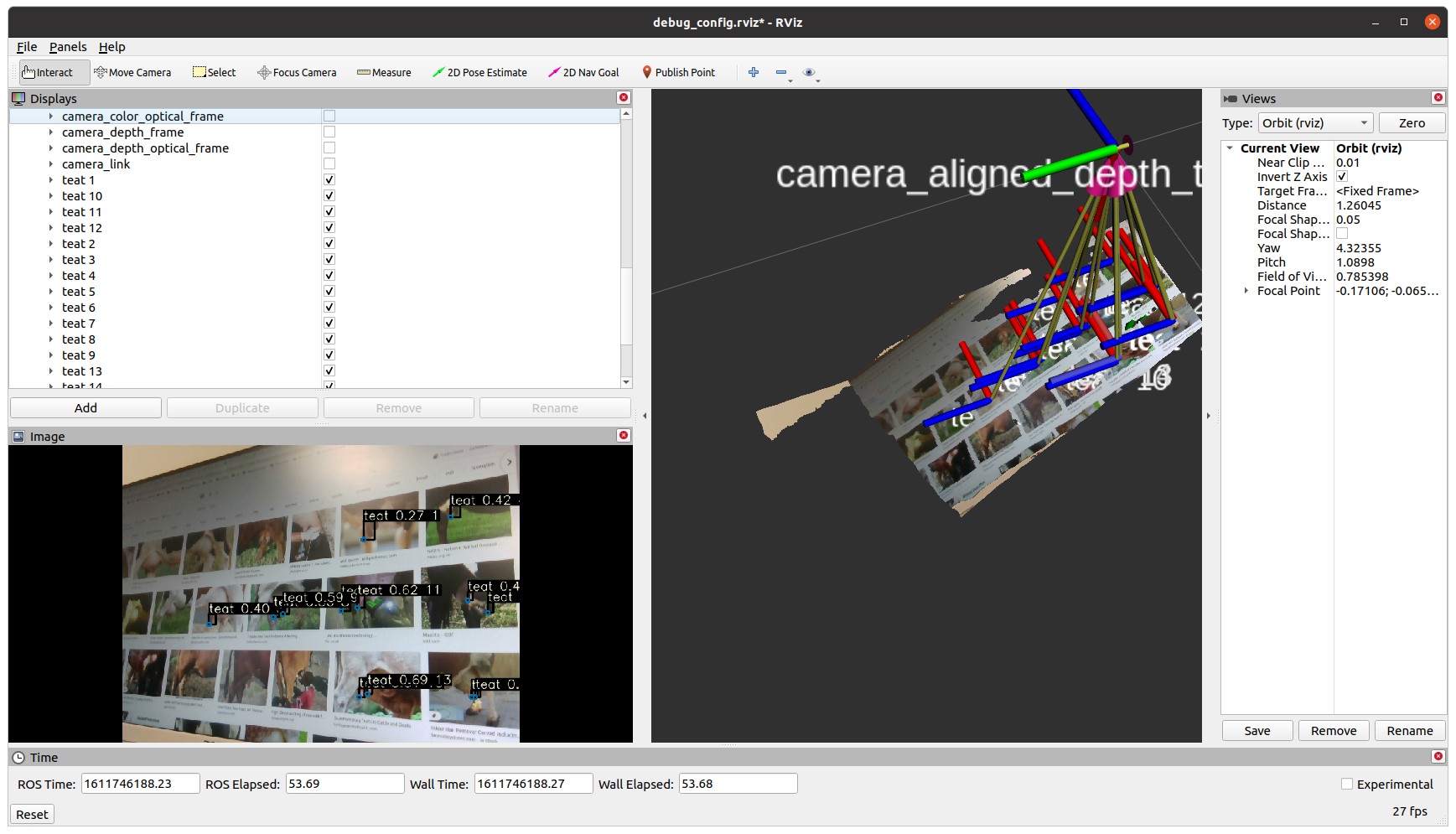
The sample result that I achieved up until now is shown in this screenshot:
The series of tasks described below:
- Grab the first cups from a fixed location and go to the work location (under cow udder), detect the four teats and attach the first cup to the left-back teat.
- Same with the remaining three teat in the above sequence.
Question:
- What package should I use? Eg. MoveIt? How can I implement it?
- How can I set the fixed location for the cup?
- How can I get the sequence of the teat?
- How can I achieve the series of goals for this use-case?
Thanks in advance for helping.

I uploaded your images to the post because I enjoyed the cow teat detector. You should have enough karma to do it yourself in the future. I can't post a response right now, but I'll say that it's quite a broad set.
Thanks a lot for reposting my question...